

一文详解PnP算法原理
source link: https://zhuanlan.zhihu.com/p/423797592
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

一文详解PnP算法原理
PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。数学语言描述如下:
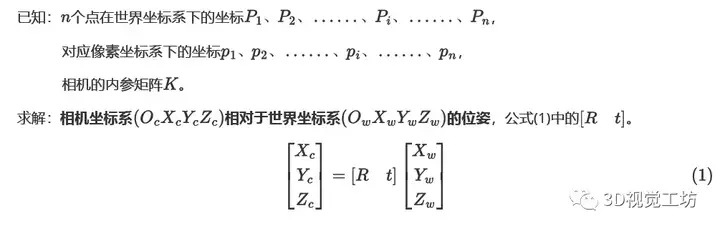
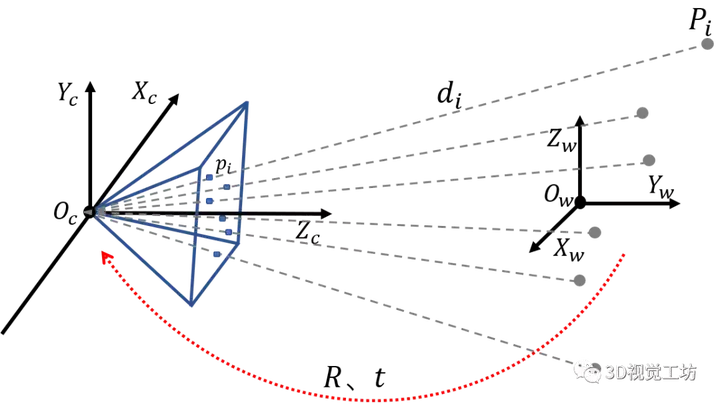 图1.PnP几何结构
图1.PnP几何结构作者:竹石|来源微信公众号:3D视觉工坊
3D视觉精品课程推荐:
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
1.直接线性变换法(Direct Linear Transform,DLT)
假设:摄像机已经校准过了。已知:

求解相机的外参:R、t透视投影模型为:
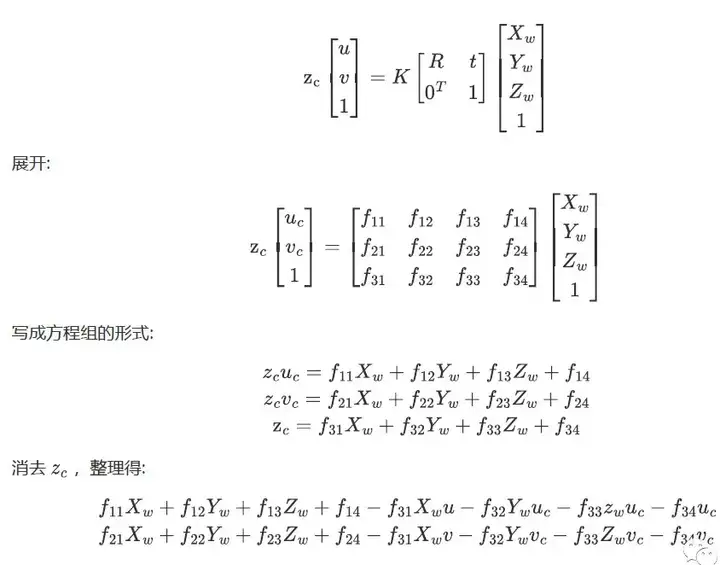
每组3D-2D匹配点对应两个方程,一共有12个未知数,至少需要6组匹配点。设有N组匹配点,则:
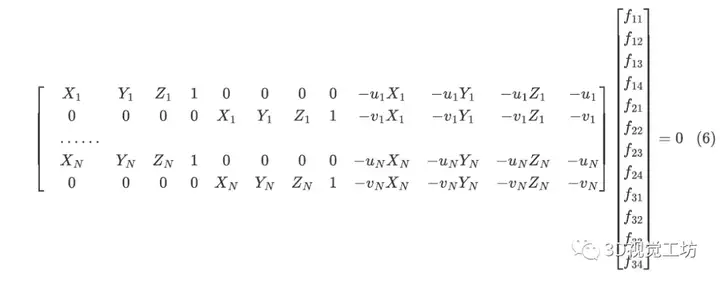
上式写成矩阵形式:AF=0
当N=6时,可以直接求解线性方程组。
因此, 旋转矩阵, 平移矩阵求得:
2.P3P
P3P问题是已知三个3D目标点与其2D投影之间的对应关系,来确定标定相机的位姿问题。
图2.两点约束注:直接线性变换法,只考虑了线性意义下的最优解,没有考虑几何约束。而P3P考虑了三角约束,给出三角约束意义下的最优解
2.1 Zero Structure for the P3P Equation System
文章[1]:Complete Solution Classification for the Perspective-Three-Point Problem
图3.三点约束对于公式(16)的变量有一些真实的约束:
图4.三点约束--重定义边长公式(17)消去C、v,得ES:
2.2 PST
文章[2]:A Stable Direct Solution of Perspective-Three-Point Problem使用相似三角形,利用几何约束来减少未知参数的个数,把P3P方程组转化为四次方程,该称为透视相似三角形方法(Perspective Similar Triangle ,PST)。
(1)P3P问题转为PST问题
图5.P3P几何结构(2)PST的求解
图6.PST几何结构
图6.PST几何结构
约束1:相似三角形对应边成比例
(3)PST多解和缺解问题
由PST(perspective similar Triangle)求解,可得方程组等效转换为四次多项式
多解问题:由于存在多组解,相机位姿不能从3点集唯一确定的。解的个数直接对应于四次多项式实根的个数。要得到唯一的解,至少还应引入一点,构建2个三角形,进行求解。另一种方法是RANSAC算法,该算法将点集划分为3个点子集,检查这些子集的一致性。RANSAC算法参考文献:Random Sample Consensus: A Paradigm for Model Fitting with Apphcatlons to Image Analysis and Automated Cartography缺解问题:
缺解问题是由P3P的固有结构决定的,其他P3P方法,如迭代解法、几何解法和分类法,也有同样的问题。
3.RPnP
文章[3]:A Robust O(n) Solution to the Perspective-n-Point Problem
下面来看一下,如何建立新的正交坐标系,以及如何求解正交坐标系到相机坐标系之间[R T]。
3.1确定旋转轴
当确定旋转轴时,只需求解剩余的旋转和三个平移参数,减少了未知变量的数量,来提高方程组的数值精度。
3.2求解旋转角和平移矢量的方程
相机坐标系与新坐标系绕之间的旋转矩阵:
3.3获取相机的位姿
再获取到相机坐标系与新坐标系绕之间的旋转和平移矩阵,进而可直接相机坐标系与世界坐标系绕之间旋转和平移矩阵,即相机的位姿。
引文:
[1] Gao, X. S. , et al. "Complete solution classification for the perspective-three-point problem." IEEE Transactions on Pattern Analysis & Machine Intelligence 25.8(2003):930-943.[2] Li, S. , and X. Chi . "A Stable Direct Solution of Perspective-Three-Point Problem." International Journal of Pattern Recognition and Artificial Intelligence 25.5(2011):627-642.[3] Li, S. , X. Chi , and X. Ming . "A Robust O(n) Solution to the Perspective-n-Point Problem." IEEE Transactions on Pattern Analysis and Machine Intelligence (2012).[4]W. Press, S. Teukolsky, W. Vetterling, and B. Flannery,Numerical Recipes:The Art of Scientific Computing.Cambridge Univ. Press, 2007.[5]S. Umeyama, “Least-Squares Estimation of Transformation Parameters between Two Point Patterns,”IEEE Trans. Pattern Analysis and Machine Intelligence,vol. 13, no. 4, pp. 376-380, Apr. 1991.
更多干货
欢迎加入【3D视觉工坊】交流群,方向涉及3D视觉、计算机视觉、深度学习、vSLAM、激光SLAM、立体视觉、自动驾驶、点云处理、三维重建、多视图几何、结构光、多传感器融合、VR/AR、学术交流、求职交流等。工坊致力于干货输出,为3D领域贡献自己的力量!欢迎大家一起交流成长~
添加小助手微信:CV_LAB,备注学校/公司+姓名+研究方向即可加入工坊一起学习进步。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK