

面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
source link: https://zhuanlan.zhihu.com/p/419736789
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
背景介绍
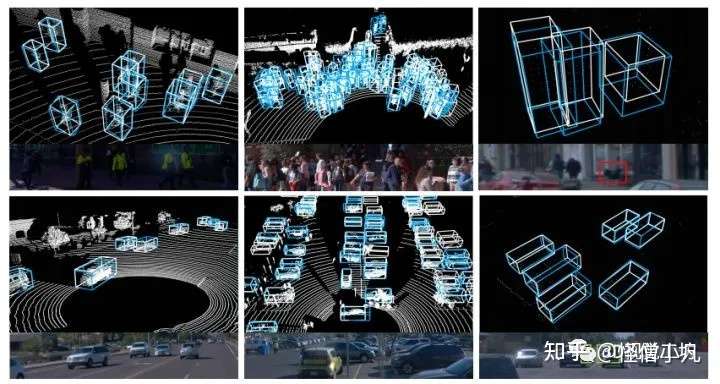
3D检测用于获取物体在三维空间中的位置和类别信息,主要基于点云、双目、单目和多模态数据等方式。其中,点云数据由于具有较为丰富的几何信息,相比于其它单模态数据更为稳定,基于激光雷达点云数据的3D目标检测技术被越来越多地应用在自动驾驶、移动机器人中。随着AI技术的大规模落地,图森、百度、滴滴、Waymo、华为、纵目科技、智加科技、Momenta、赢彻科技、小鹏、蔚来、魔视智能等公司开始逐渐落地自己的L2~L4等级的辅助/自动驾驶产品,3D检测作为自动驾驶中的核心技术,在空间感知上优于2D任务,两者的融合能进一步提高产品的性能,因此无论是在学术界或工业界都备受关注。近年来,CVPR、ECCV、ICCV等计算机视觉顶会开始逐渐增加相关工作的录用率,工业界也相继推出了一系列兼顾准确率和速度的算法,未来实属可期!
课程链接:https://mp.weixin.qq.com/s/ZarpWfHb-cf-kafH2l4kjA

然而,由于三维点云数据的处理较为复杂,完整的结构设计和落地较为困难,符合企业要求的相关人才少之又少,许多自动驾驶公司不息重金求贤,希望能将相关技术落地到产品中抢占市场。
如何入门学习
然而由于门槛较高,无论是高校还是企业,针对3D检测领域的相关课程少之又少,许多童鞋不得不反复阅读英文文献和复杂的开源代码,从3D数据处理、网络的搭建、loss的设计优化等模块逐一踩坑,学习效率得不到保证,而且自身理解和真实情况往往有一定偏差。许多对该领域感兴趣的童鞋无从下手,而这也正是工坊推出该课程的初衷,希望通过讲师的一些工程项目经验帮助大家进入喜欢的行业。
课程大纲
本课程将系统以3D点云深度学习为主,对Point-based和Voxel-based系列的3D目标检测网络架构进行系统剖析和代码梳理,助力各位同学在点云深度学习更快的入门和更深的理解。
讲师介绍
讲师王汐,北京理工大学自动化专业博士,曾在多家自动驾驶公司就职,有丰富的自动驾驶感知经验,精通主流视觉感知及点云三维感知方法,落地多个产品功能模块。
课程亮点
1、深入浅出,循序渐进,从理论到实战逐个攻破;
2、讲师数年工程经验倾情奉献,数据、源码开源帮助学员更好地理解每一个细节;
3、优质的学习圈子,专属的交流群,可以和来自上海交大、南京大学、华中科技大学、西北工业大学等高校学子一起讨论学习,你踩过的坑他们大概率踩过;
4、真正能面向工业落地的内容分享;
学后收获
1、对基于点云数据的3D检测网络体系有较深的理解,能够熟练掌握点云数据的处理方式;
2、能够掌握基于点云单模态数据的3D检测算法原理与多模态融合方案的算法原理;
3、熟练掌握各类3D检测网络的源码实现,能够自己搭起一套工程;
4、能够真正对接企业级融合算法工程师的技术栈要求;
开课时间
2021年11月6日正式开课,历时两个月,详细课表以学习群内公告为准。
面向对象
1、主要面向自动驾驶领域相关的在读本科生、硕士、博士,以及正在工作岗位上上的一线工程算法人员,也欢迎想要转入该领域的其它方向的童鞋。
2、需要有一定的计算机视觉和深度学习相关基础知识,熟悉C++、Python编程;
3、对自动驾驶领域拥有浓厚的兴趣和信心;
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK