

SLAM从入门到精通(用c++实现机器人运动控制)
source link: https://blog.csdn.net/feixiaoxing/article/details/133241656
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
之前的一篇文章,我们知道了可以通过wpr_simulation包仿真出机器人和现场环境。如果需要控制机器人,这个时候就需要rqt_robot_steering这个包来实现。可是大家有没有想过,为什么用rqt_robot_steering就可以实现对车的控制,如果是我们自己用c++编程,是不是也可以实现相同的控制呢?
1、rqt_bot_steering控制的原因
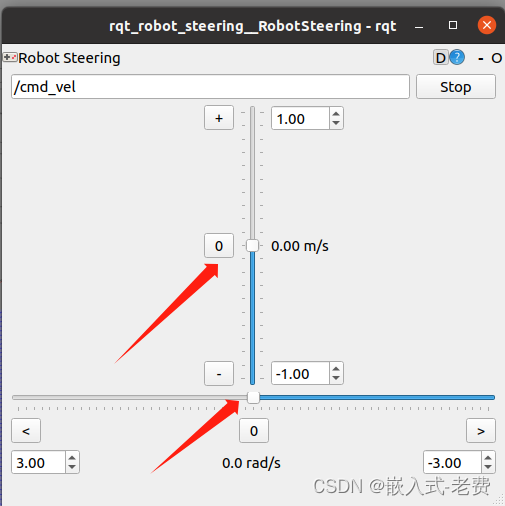
不知道大家对这样的一幅图,究竟还有没有印象。rqt_robot_steering能对小车进行控制,本质原因还是因为它给/cmd_vel发送了消息。简而言之,如果我们能编写对应的消息,那么其实也可以实现对小车的控制。
2、编写vel_node.cpp文件

代码的编写部分主要集中在vel_msg的发布。这里面有两个知识点,一个是/cmd_vel的发布;一个是vel_msg的填写。其中linear下面的x、y、z指的是三个方向的线速度,而angular下面的x、y、z则指的是围绕三个轴的角速度。线速度的单位一般是m/s,而角速度一般单位是弧度/s。
3、更新CMakeLists.txt文件
4、准备编译
编译的方法其实很简单,和之前ros的编译方法是一样的。即在catkin_ws输入catkin_make即可。如果没有问题,就可以生成vel_node程序。
5、验证vel_node是否ok
要验证vel_node程序是否真的发挥了作用,主要流程就是两个步骤。第一,用roslaunch启动wpr_simulation,
roslaunch wpr_simulation wpb_simple.launch第二,用rosrun启动vel_node,回头看gazebo里面的小车,如果小车式向前进行了移动,那么说明我们编写的vel_node程序是成功的。反之,如果没有看到这样的现象,那么就要回头看下,究竟我们在编写代码的过程中引入了什么错误。
rosrun beginner_tutorials vel_node不管是仿真,还是真实的机器人,线速度和角速度是机器人底盘控制的重要目标,建议这部分好好掌握。对于平面小车来说,一般linear的z为0,angular的x和y为0。
常见的控制目标如下所示,
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK