

OpenHarmony:全流程讲解如何编写Watchdog平台驱动以及应用程序-开源基础软件社区-51C...
source link: https://ost.51cto.com/posts/26632
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

1、程序介绍
本程序是基于OpenHarmony标准系统编写的平台驱动案例:Watchdog
目前已在凌蒙派-RK3568开发板跑通。详细资料请参考官网:https://gitee.com/Lockzhiner-Electronics/lockzhiner-rk3568-openharmony/tree/master/samples/b10_platform_device_watchdog
详细资料请参考官网:
由于开发板只有1个Watchdog,且已被OpenHarmony内部占用,本案例只能让读者熟悉Watchdog相关接口以及应用,无法应用呈现。
2、基础知识
2.1、Watchdog简介
看门狗(Watchdog),又称看门狗计时器(Watchdog timer),是一种硬件计时设备。一般有一个输入、一个输出,输入叫做喂狗,输出连接到系统的复位端。当系统主程序发生错误导致未及时清除看门狗计时器的计时值时,看门狗计时器就会对系统发出复位信号,使系统从悬停状态恢复到正常运作状态。
系统正常工作的时候,每隔一段时间输出一个信号到喂狗端,给看门狗清零,这个操作就叫做喂狗。如果超过规定的时间不喂狗,看门狗定时超时,就会给出一个复位信号到系统,使系统复位。
2.2、Watchdog驱动开发
2.2.1、Watchdog驱动开发接口
为了保证上层在调用Watchdog接口时能够正确的操作Watchdog控制器,核心层在//drivers/hdf_core/framework/support/platform/include/watchdog/watchdog_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
WatchdogMethod定义:
struct WatchdogMethod {
int32_t (*getStatus)(struct WatchdogCntlr *wdt, int32_t *status);
int32_t (*setTimeout)(struct WatchdogCntlr *wdt, uint32_t seconds);
int32_t (*getTimeout)(struct WatchdogCntlr *wdt, uint32_t *seconds);
int32_t (*start)(struct WatchdogCntlr *wdt);
int32_t (*stop)(struct WatchdogCntlr *wdt);
int32_t (*feed)(struct WatchdogCntlr *wdt);
int32_t (*getPriv)(struct WatchdogCntlr *wdt); // 【可选】如果WatchdogCntlr中的priv成员存在,则按需实例化
void (*releasePriv)(struct WatchdogCntlr *wdt); // 【可选】
};
WatchdogMethod成员的钩子函数功能说明:

2.2.2、Watchdog驱动开发步骤
Watchdog模块适配HDF框架包含以下四个步骤:
- 实例化驱动入口。
- 配置属性文件。
- 实例化Watchdog控制器对象。
- 驱动调试。
我们以///drivers/hdf_core/adapter/khdf/linux/platform/watchdog/watchdog_adapter.c为例(该watchdog驱动是建立于Linux Watchdog子系统基础上创建)。
2.2.2.1、驱动实例化驱动入口
驱动入口必须为HdfDriverEntry(在 hdf_device_desc.h 中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。 一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
Watchdog驱动入口开发参考:
struct HdfDriverEntry g_hdfWdtchdog = {
.moduleVersion = 1,
.moduleName = "HDF_PLATFORM_WATCHDOG", // 【必要且与HCS文件中里面的moduleName匹配】
.Bind = HdfWdtBind, // 见Bind参考
.Init = HdfWdtInit, // 见Init参考
.Release = HdfWdtRelease, // 见Release参考
};
HDF_INIT(g_hdfWdtchdog); // 调用HDF_INIT将驱动入口注册到HDF框架中
2.2.2.2、配置属性文件
完成驱动入口注册之后,需要在device_info.hcs文件中添加deviceNode描述。deviceNode信息与驱动入口注册相关。本例以一个Watchdog控制器为例,如有多个器件信息,则需要在device_info文件增加对应的deviceNode描述。器件属性值与核心层WatchdogCntlr成员的默认值或限制范围有密切关系,比如Watchdog设备号,需要在watchdog_config.hcs文件中增加对应的器件属性。
在//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs文件中添加deviceNode描述:
device_watchdog :: device { // 设备节点
device0 :: deviceNode { // 驱动的DeviceNode节点
policy = 2; // policy字段是驱动服务发布的策略,如果需要面向用户态,则为2
priority = 20; // 驱动启动优先级
permission = 0644; // 驱动创建设备节点权限
moduleName = "HDF_PLATFORM_WATCHDOG"; // 【必要】用于指定驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
serviceName = "HDF_PLATFORM_WATCHDOG_0"; // 【必要】驱动对外发布服务的名称,必须唯一。
deviceMatchAttr = "rockchip_rk3568_watchdog_0"; // 【必要】用于配置控制器私有数据,必须和驱动私有数据配置表watchdog_config.hcs中的match_attr值保持一致。
}
}
在//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/rk3568_watchdog_config.hcs文件配置器件属性,其中配置参数如下:
root {
platform {
watchdog_config {
template watchdog_device {
serviceName = "HDF_PLATFORM_WATCHDOG_0";
match_attr = "";
id = 0;
}
device_0x12050000 :: watchdog_device {
id = 0;
match_attr = "rockchip_rk3568_watchdog_0";
}
}
}
}
2.2.2.3、实例化Watchdog控制器对象
完成驱动入口注册之后,下一步就是以核心层WatchdogCntlr对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化WatchdogCntlr成员WatchdogMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind,Init,Release)。
WatchdogCntlr成员钩子函数结构体WatchdogMethod的实例化,其他成员在Init和Bind函数中初始化。
// 钩子函数实例化
static struct WatchdogMethod g_wdtMethod = {
.getStatus = WdtAdapterGetStatus, // 获取看门狗状态
.start = WdtAdapterStart, // 启动看门狗
.stop = WdtAdapterStop, // 停止看门狗
.setTimeout = WdtAdapterSetTimeout, // 设置看门狗超时时间
.getTimeout = WdtAdapterGetTimeout, // 获取看门狗超时时间
.feed = WdtAdapterFeed, // 喂狗函数
.getPriv = WdtOpenFile,
.releasePriv = WdtAdapterClose,
};
2.2.2.4、驱动调试
建议先在Linux下修改确认,再移植到OpenHarmony。
2.3、Watchdog应用开发
看门狗(Watchdog),又称看门狗计时器(Watchdog timer),是一种硬件计时设备。一般有一个输入、一个输出,输入叫做喂狗,输出连接到系统的复位端。当系统主程序发生错误导致未及时清除看门狗计时器的计时值时,看门狗计时器就会对系统发出复位信号,使系统从悬停状态恢复到正常运作状态。
Watchdog接口定义了看门狗操作的通用方法集合,包括:
- 打开/关闭看门狗设备
- 启动/停止看门狗设备
- 设置/获取看门狗设备超时时间
- 获取看门狗设备状态
2.3.1、接口说明
Watchdog模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/watchdog_if.h。
Watchdog驱动API接口功能介绍如下所示:
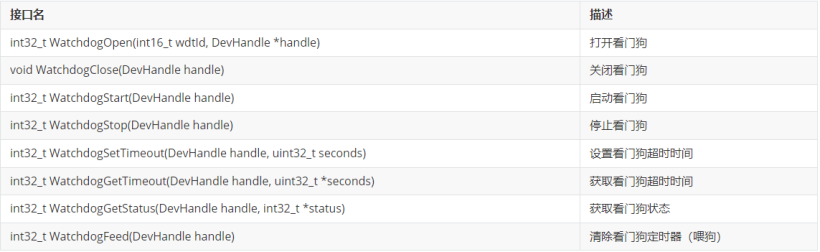
(1)WatchdogOpen
在操作看门狗之前,需要调用WatchdogOpen打开看门狗设备,一个系统可能有多个看门狗,通过看门狗ID号来打开指定的看门狗设备。
DevHandle WatchdogOpen(int16_t wdtId, DevHandle *handle);
WatchdogOpen参数定义如下:

WatchdogOpen返回值定义如下:

(2)WatchdogClose
当所有操作完毕后,调用WatchdogClose关闭打开的看门狗设备。
void WatchdogClose(DevHandle handle);
WatchdogClose参数定义如下:
(3)WatchdogStart
启动看门狗。
int32_t WatchdogStart(DevHandle handle);
WatchdogStart参数定义如下:
WatchdogStart返回值定义如下:

(4)WatchdogStop
停止看门狗。
int32_t WatchdogStop(DevHandle handle);
WatchdogStop参数定义如下:

WatchdogStop返回值定义如下:

(5)WatchdogSetTimeout
设置超时时间。
int32_t WatchdogSetTimeout(DevHandle *handle, uint32_t seconds);
WatchdogSetTimeout参数定义如下:

WatchdogSetTimeout返回值定义如下:

(6)WatchdogGetTimeout
获取超时时间。
int32_t WatchdogGetTimeout(DevHandle *handle, uint32_t *seconds);
WatchdogGetTimeout参数定义如下:

WatchdogGetTimeout返回值定义如下:

(7)WatchdogGetStatus
获取看门狗状态。
int32_t WatchdogGetStatus(DevHandle handle, int32_t *status);
WatchdogGetStatus参数定义如下:

WatchdogGetStatus返回值定义如下:

(8)WatchdogFeed
int32_t WatchdogFeed(DevHandle handle);
WatchdogFeed参数定义如下:
WatchdogFeed返回值定义如下:

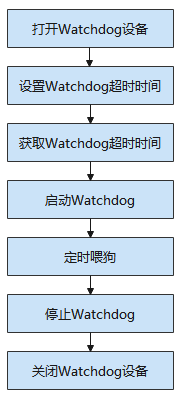
2.2.2、开发流程
使用Watchdog设备的一般流程如下图所示:
3、程序解析
3.1、准备工作
3.2、Linux内核解析
3.2.1、创建Linux内核Git
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.2、修改设备树Watchdog配置
修改//arch/arm64/boot/dts/rockchip/rk3568.dtsi(即该目录是指已打Patch后的Linux内核,不是OpenHarmony主目录),定义Watchdog启用,具体如下所示:
wdt: watchdog@fe600000 {
compatible = "snps,dw-wdt";
reg = <0x0 0xfe600000 0x0 0x100>;
clocks = <&cru TCLK_WDT_NS>, <&cru PCLK_WDT_NS>;
clock-names = "tclk", "pclk";
interrupts = <GIC_SPI 149 IRQ_TYPE_LEVEL_HIGH>;
status = "okay";
};
该部分为默认启动看门狗。
3.2.3、创建内核patch
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.4、替换OpenHarmony的内核patch
将制作出的kernel.patch替换到//kernel/linux/patches/linux-5.10/rk3568_patch/kernel.patch即可。
3.2.5、开启watchdog内核配置
在//kernel/linux/config/linux-5.10/arch/arm64/configs/rk3568_standard_defconfig(即该目录为OpenHarmony主目录),开启watchdog的hdf驱动,具体如下所示:
CONFIG_DRIVERS_HDF_PLATFORM_WATCHDOG=y
3.3、OpenHarmony配置树配置
3.3.1、device_info.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs已定义好,具体如下:
device_watchdog :: device {
device0 :: deviceNode {
policy = 2;
priority = 20;
permission = 0644;
moduleName = "HDF_PLATFORM_WATCHDOG";
serviceName = "HDF_PLATFORM_WATCHDOG_0";
deviceMatchAttr = "rockchip_rk3568_watchdog_0";
}
}
- device0:watchdog一般只需要1个设备节点即可。
- policy:policy字段是驱动服务发布的策略,如果需要面向用户态,则为2。
- moduleName:用于指定驱动名称,该字段的值必须和驱动入口结构的moduleName值一直,表示该节点对应。于//drivers/hdf_core/adapter/khdf/linux/platform/watchdog/watchdog_adapter.c,该驱动是对接Linux Watchdog子系统。
- deviceMatchAttr:用于配置控制器私有数据,必须和驱动私有数据配置表watchdog_config.hcs中的match_attr值保持一致
3.3.2、Watchdog_config.hcs
在//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/watchdog_config.hcs,具体内容如下:
root {
platform {
watchdog_config {
template watchdog_device {
serviceName = "HDF_PLATFORM_WATCHDOG_0";
match_attr = "";
id = 0;
}
device_0x12050000 :: watchdog_device {
id = 0;
match_attr = "rockchip_rk3568_watchdog_0";
}
}
}
}
- id:表示Linux系统中watchdog的设备号(即/dev/watchdog0)。
- match_attr:必须与之前的device_info.hcs一致。
3.4、OpenHarmony Watchdog平台驱动
在//drivers/hdf_core/adapter/khdf/linux/platform/watchdog/watchdog_adapter.c已编写对接Linux Watchdog驱动的相关代码,具体内容如下:
struct HdfDriverEntry g_hdfWdtchdog = {
.moduleVersion = 1,
.moduleName = "HDF_PLATFORM_WATCHDOG",
.Bind = HdfWdtBind,
.Init = HdfWdtInit,
.Release = HdfWdtRelease,
};
HDF_INIT(g_hdfWdtchdog);
该部分代码不细述,感兴趣的读者可以去详读。
3.5、应用程序
3.5.1、Watchdog_test.c
Watchdog相关头文件如下所示:
#include "watchdog_if.h" // watchdog标准接口头文件
主函数负责看门狗相关操作。
其中,打开看门狗操作源代码具体如下:
// 打开看门狗设备
ret = WatchdogOpen(m_watchdog_id, handle);
if (ret != 0) {
PRINT_ERROR("WatchdogOpen failed and ret = %d\n", ret);
goto out;
}
if (handle == NULL) {
PRINT_ERROR("WatchdogOpen failed and handle is null\n");
goto out;
}
......
设置和获取看门狗超时时间操作源代码如下所示:
// 设置超时时间
ret = WatchdogSetTimeout(handle, m_watchdog_timeout);
if (ret != 0) {
PRINT_ERROR("WatchdogSetTimeout failed and ret = %d\n", ret);
goto out;
}
printf("WatchdogSetTimeout Successful and Watchdog timeout = %d\n", m_watchdog_timeout);
// 获取超时时间
ret = WatchdogGetTimeout(handle, &timeout);
if (ret != 0) {
PRINT_ERROR("WatchdogGetTimeout failed and ret = %d\n", ret);
goto out;
}
printf("WatchdogGetTimeout Successful and Watchdog timeout = %d\n", timeout);
启动看门狗操作,如下所示:
// 启动看门狗
ret = WatchdogStart(handle);
if (ret != 0) {
PRINT_ERROR("WatchdogStart failed and ret = %d\n", ret);
goto out;
}
查看看门狗相关状态,如下所示:
// 获取看门狗状态,是否启动
status = WATCHDOG_STOP;
ret = WatchdogGetStatus(handle, &status);
if (ret != 0) {
PRINT_ERROR("WatchdogGetStatus failed and ret = %d\n", ret);
goto out;
}
printf("WatchdogGetStatus Successful and Watchdog status = %d, WATCHDOG_START = %d, WATCHDOG_STOP = %d\n",
status, WATCHDOG_START, WATCHDOG_STOP);
喂狗和停止喂狗操作,如下所示:
// 喂狗
for (i = 0; i < m_watchdog_feed_count; i++) {
sleep(m_watchdog_feed);
printf("Watchdog: feed number = %d and feed time = %d\n", i, m_watchdog_feed);
ret = WatchdogFeed(handle);
if (ret != 0) {
PRINT_ERROR("WatchdogFeed failed and ret = %d\n", ret);
goto out;
}
}
// 停止喂狗
ret = WatchdogStop(handle);
if (ret != 0) {
PRINT_ERROR("WatchdogStop failed and ret = %d\n", ret);
goto out;
}
关闭喂狗,如下所示:
WatchdogClose(handle);
3.5.2、BUILD.gn
编写应用程序的BUILD.gn,具体内容如下:
import("//build/ohos.gni")
import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni")
print("samples: compile rk3568_watchdog_test")
ohos_executable("rk3568_watchdog_test") {
sources = [ "watchdog_test.c" ]
include_dirs = [
"$hdf_framework_path/include",
"$hdf_framework_path/include/core",
"$hdf_framework_path/include/osal",
"$hdf_framework_path/include/platform",
"$hdf_framework_path/include/utils",
"$hdf_uhdf_path/osal/include",
"$hdf_uhdf_path/ipc/include",
"//base/hiviewdfx/hilog/interfaces/native/kits/include",
"//third_party/bounds_checking_function/include",
]
deps = [
"$hdf_uhdf_path/platform:libhdf_platform",
"$hdf_uhdf_path/utils:libhdf_utils",
"//base/hiviewdfx/hilog/interfaces/native/innerkits:libhilog",
]
cflags = [
"-Wall",
"-Wextra",
"-Werror",
"-Wno-format",
"-Wno-format-extra-args",
]
part_name = "product_rk3568"
install_enable = true
}
3.5.3、参与应用程序编译
编辑//vendor/lockzhiner/rk3568/samples/BUILD.gn,开启编译选项。具体如下:
"b10_platform_device_watchdog/app:rk3568_watchdog_test"
4、程序编译
建议使用docker编译方法,运行如下:
hb set -root .
hb set
# 选择lockzhiner下的rk3568编译分支。
hb build -f
5、运行结果
运行如下:
# rk3568_Watchdog_test
Watchdog Params:
watchdog id = 0
watchdog timeout sec = 5
watchdog feed sec = 1
watchdog feed count = 5
../../vendor/lockzhiner/rk3568/samples/b10_platform_device_watchdog/app/watchdog_test.c, main, 121, error: WatchdogOpen failed and ret = -16
WatchdogClose Successful
#
(1)WatchdogOpen返回值为-16,查看//drivers/hdf_core/framework/include/utils/hdf_base.h,具体如下:
/**
* @brief Enumerates HDF return value types.
*/
typedef enum {
HDF_SUCCESS = 0, /**< The operation is successful. */
HDF_FAILURE = -1, /**< Failed to invoke the OS underlying function. */
HDF_ERR_NOT_SUPPORT = -2, /**< Not supported. */
HDF_ERR_INVALID_PARAM = -3, /**< Invalid parameter. */
HDF_ERR_INVALID_OBJECT = -4, /**< Invalid object. */
HDF_ERR_MALLOC_FAIL = -6, /**< Memory allocation fails. */
HDF_ERR_TIMEOUT = -7, /**< Timeout occurs. */
HDF_ERR_THREAD_CREATE_FAIL = -10, /**< Failed to create a thread. */
HDF_ERR_QUEUE_FULL = -15, /**< The queue is full. */
HDF_ERR_DEVICE_BUSY = -16, /**< The device is busy. */
HDF_ERR_IO = -17, /**< I/O error. */
HDF_ERR_BAD_FD = -18, /**< Incorrect file descriptor. */
HDF_ERR_NOPERM = -19, /**< No permission. */
......
} HDF_STATUS;
如此可知,watchdog被其他程序占用。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK