
3

机器人路径规划算法(十一)A-star算法
source link: https://mronne.github.io/2020/04/03/%E6%9C%BA%E5%99%A8%E4%BA%BA%E8%B7%AF%E5%BE%84%E8%A7%84%E5%88%92%E7%AE%97%E6%B3%95-%E5%8D%81%E4%B8%80-A-star-%E7%AE%97%E6%B3%95.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

A* 算法是在形成的路径连通图上寻找最佳路径。在连通图上进行路径搜索有以下几种算法:
- 广度优先搜索(Breadth First Search):在所有方向上均匀探索,适用于地图所有代价都一致的场景。可覆盖地图所有区域,但搜索速度较慢。
- Dijkstra’s Algorithm:优先考虑低代价的路径进行探索,可以找到去所有方向的路径,适用于不同区域不同代价的场景。
- A* :A* 算法是Dijkstra’s的变种,考虑了距离目标的代价,可快速找到最短路径。
广度优先搜索 Breadth First Search
- 广度优先搜索的核心在于对地图进行广度遍历即探索边界的扩张,对于栅格地图常常称为“泛洪”,如下图所示:
编写程序实现对地图的探索,步骤如下
- 定义探索的边界队列 frontier,重复如下步骤直至其为空
- 从边界队列frontier中选择一个location,将其移除
- 对location的周围邻居neighbors进行检查。 如果它不在visited set中,就将其加入到frontier里,并加入到visited set中
python实现广度地图探索代码如下
frontier = Queue()
frontier.put(start )
visited = {}
visited[start] = True
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
if next not in visited:
frontier.put(next)
visited[next] = True- 上述过程是对整个地图的探索,但要想找到路径需要保存当前节点的父节点,到达终点后回溯即可确定路径。即确定一个新数组came_from,保存当前节点的父节点。
python 代码如下
frontier = Queue()
frontier.put(start )
came_from = {}
came_from[start] = None
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
if next not in came_from:
frontier.put(next)
came_from[next] = current
确定路径时只需回溯即可
current = goal
path = []
while current != start:
path.append(current)
current = came_from[current]
path.append(start) # optional
path.reverse() # optional
Early Exit
- 在实际情况中无需遍历所有的地图,在到达终点后及时停止可减少程序运行时间。
frontier = Queue()
frontier.put(start )
came_from = {}
came_from[start] = None
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
if next not in came_from:
frontier.put(next)
came_from[next] = current
Dijkstra’s Algorithm
- 假如地图中不同的区域存在不同的代价,广度优先搜索明显不适用了。
- 在此时需要采取记录到当前点总共花费的代价,如果该位置的新路径比之前的最佳路径的代价更低,将采用此条路径。
frontier = PriorityQueue() # 优先级队列 依据代价大小进行顺序存储
frontier.put(start, 0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start] = 0
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
new_cost = cost_so_far[current] + graph.cost(current, next)
if next not in cost_so_far or new_cost < cost_so_far[next]:
cost_so_far[next] = new_cost
priority = new_cost
frontier.put(next, priority)
came_from[next] = current
- Dijkstra’s Algorithm实际是改变了边界扩展的方式,相比于广度优先搜索,考虑了地图代价,能找到最优路径。
启发式搜索
- 广度优先搜索和Dijkstra算法中,边界向各个方向扩展。
- 为提高算法的搜索速度,考虑让边界尽可能向着目标方向扩展,即定义一个启发式函数表明与目标之间的距离:
def heuristic(a, b):
# Manhattan distance on a square grid
return abs(a.x - b.x) + abs(a.y - b.y)
Greedy Best First Search
- 优先考虑距离目标近的区域
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
came_from[start] = None
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
if next not in came_from:
priority = heuristic(goal, next)
frontier.put(next, priority)
came_from[next] = current
相比于广度优先搜索,能快速找到通往目标的路径,但在复杂环境中可能无法得到最优解。
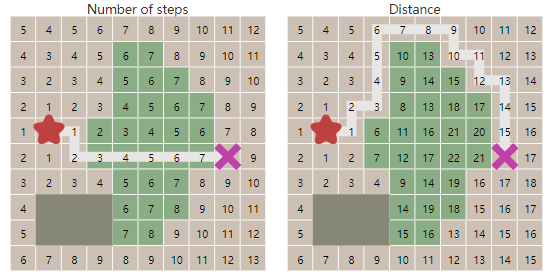
- 综上所述,Dijkstra算法可以很好地找到最短路径,但是它会浪费时间在不太有前途的方向上。Greedy Best First Search在有希望的方向探索,但它可能找不到最短路径。
- A*算法将这两种算法结合到一起,考虑从start到current location的实际代价,以及从current location到goal的估计代价。
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start] = 0
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
new_cost = cost_so_far[current] + graph.cost(current, next)
if next not in cost_so_far or new_cost < cost_so_far[next]:
cost_so_far[next] = new_cost
priority = new_cost + heuristic(goal, next)
frontier.put(next, priority)
came_from[next] = current
- 最优路径:广度优先搜索和Dijkstra算法保证在给定输入图的情况下找到最短路径。Greedy Best First Search有时无法找到最佳路径。如果启发式函数永远不大于真实距离,则A*一定能找到最短路径。随着启发式函数变小,A*变成了Dijkstra算法。当启发式变大时,A*变成Greedy Best First Search。
- 时间:减少图的大小有助于所有的图搜索算法。之后,使用最简单的算法;更简单的队列运行得更快。Greedy Best First Search通常比Dijkstra算法运行得快,但不会产生最优路径。对于大多数寻路需求来说,A*是一个不错的选择。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK