

SLAM从入门到精通(3d 点云数据访问)
source link: https://blog.csdn.net/feixiaoxing/article/details/133749762
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
3d 点云设备现在汽车上用的很多。之前3d lidar这种高端传感器,只能被少部分智能汽车使用。后来很多国产厂家也开始研发3d lidar之后,它的价格快速下跌下来,部分3d lidar的价格已经降到了几千元左右,实用性一下子就提升上来了。不管用它来做slam,还是用来检测物体、识别物体、避障检测,都是很方便的。所以,对于slam的同学来说,除了轮速编码器、imu、camera、单线lidar这些传统传感器之外,对多线lidar、深度摄像机一定要多加关注,它们肯定是未来发展的方向。
和图像主要采用opencv库一样,目前3d lidar数据主要采用的库是pcl。
1、编写pc_node.cpp

代码不复杂。首先我们创建一个pc_sub订阅器,它订阅了话题/kinect2/sd/points,并且为这个话题准备了回调函数PointcloudCB。在这个回调函数里面,代码对收到的点云数据进行了打印,分别显示它们的x/y/z浮点数值。一般来说,点云还会有一个反光强度的值,但这里没有提及。
多线激光雷达和单线激光雷达很相似,只不过多了一个z方向的数值。也正是因为这个z数值,让我们知道了周围环境的深度信息,这也是它最有价值的地方。
2、准备CMakeLists.txt
因为pc_node.cpp依赖于pcl库,所以这里有两件事情要解决。第一件事情,查找一下当前的依赖库里面有没有pcl,
第二件事情,就是添加编译规则,告诉CMakeLists.txt,pc_node.cpp应该怎么编译,
3、catkin_make编译
pc_node.cpp和CMakeLists.txt都准备好了,那么就可以开始编译了。编译的方法,就是在catkin_ws目录下面直接输入catkin_make即可。
4、测试和验证
测试的方法其实和camera是一样的。第一步,需要一个仿真环境,输入roslaunch wpr_simulation wpb_pointcloud.launch即可。
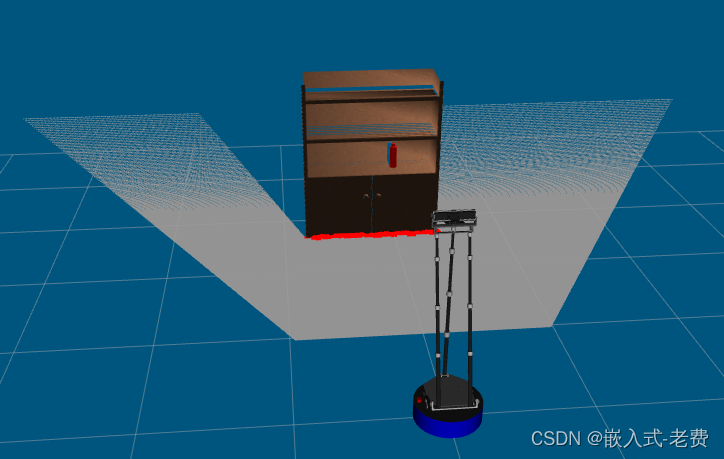
仿真环境准备好之后,第二步就可以输入rosrun beginner_tutorials pc_node,这个时候会看到很多的数据打印。这些数据就是看到的3d数据。
5、后续的工作
拿到点云数据只是第一步,后续可以通过x/y/z限制、滤波、分割、识别、统计等方法,估算出物体的具体位置。拿到这些位置信息之后,就可以进一步通知机器人去进行后续任务的处理,这个是之前传感器无法实现的效果。
当然现在用3d lidar做slam的开源代码也很多,特别是室外,靠gmapping根本是不可能的。只能靠3d lidar、gps、imu这些传感器去处理,也是未来发展一个很重要的方向。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK