

SLAM从入门到精通(lidar数据的采集)
source link: https://blog.csdn.net/feixiaoxing/article/details/133270093
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
lidar是机器人用的比较多的一种传感器。从前可能单线lidar用的比较多,现在多线lidar则开始慢慢崛起了。这里面最主要的原因还是价格。之前3d lidar动则十几万、几万的价格,这是大多数厂家都负担不起的。而现在,随着越来越多的国产厂家参与到了3d lidar的研发,这个时候lidar的价格也应声下跌,开始走入大规模商用的时代。
对于不同品牌的厂家来说,它们一般都会提供ros的lidar驱动。因为ros的lidar驱动格式是统一的,所以这个时候,对于使用者来说,拿到了ros包之后,直接rviz查看/scan话题,就可以看到对应的显示效果了。
1、lidar的数据格式
要知道lidar的数据格式,有好几种办法。最主要的方法,就是直接从ros官方网站去查找。比如,输入inde.ros.org,在查找一栏输入sensor,大概就会看到这样的搜索内容,
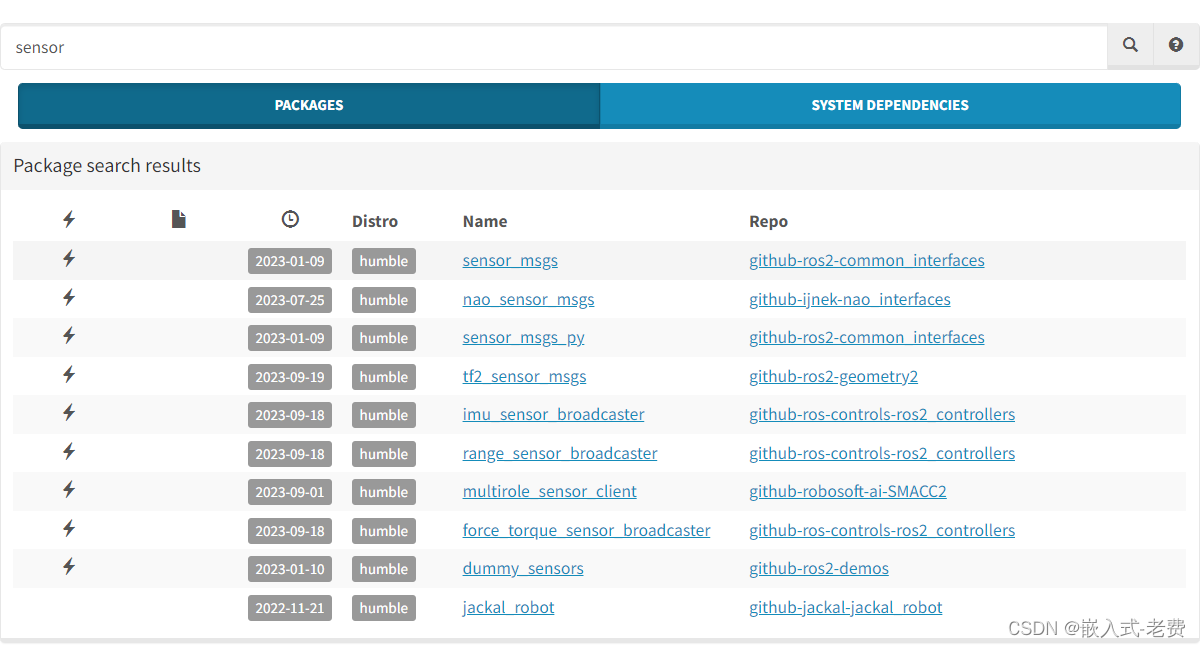
这个时候,顺着网页向下查找,我们会发现有很多的选项。直接选择第一个sensor_msgs,进入页面之后,开始往下寻找,查找到laser_scan即可,

这个时候,链接的网页之中就有我们想要的内容了,

当中比较重要的属性有angle_min、angle_max、angle_increment、ranges、intensities这些属性。ranges表示lidar的距离,是一个数组。angle表示lidar角度,angle_increment表示每次lidar的增加角度。这些都是常规变量。比较重要的量还有intensities,这个表示反射强度,某些特定的物体对lidar反射会比较高,它也是一个数组。这样就可以通过它来识别反光柱、反光条,实现基于反光柱、反光条的定位识别算法。
2、编写lidar_node.cpp代码
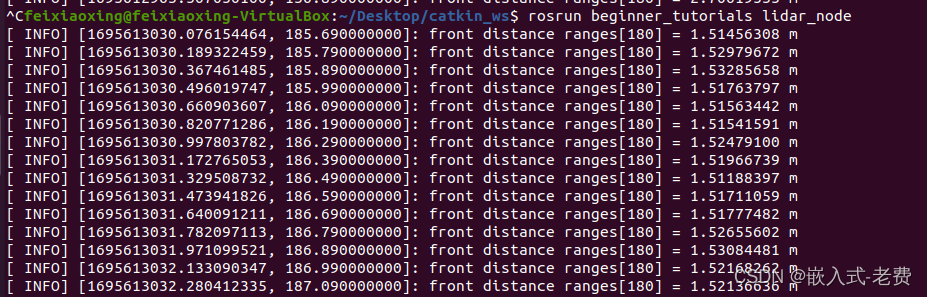
代码比较简单,主要就是订阅/scan的数据,同时定期将msg.ranges[180]的数据打印出来。这个数值其实就是机器人前方距离书柜的距离。
3、添加CMakeLists.txt
编译和之前package中的node编译没有什么区别,主要还是直接输入catkin_make即可。
调试的分成三个步骤。第一肯定是利用roslaunch打开wpb_simple.launch文件;第二,启动lidar_node节点,输入rosrun beginner_tutorials lidar_node即可。这个时候,不出意外的话,应该可以看到这些打印,
第三,如果这些打印都没有问题,可以继续启动rosrun rqt_robot_steering,这样通过控制小车的前进和后退,观察lidar_node中的打印数据有没有发生改变。如果一切和预想的一样,那么说明我们的想法是正确的。不然,就要去分析一下失败的原因了。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK