

强化学习-学习笔记11 | 解决高估问题 - climerecho
source link: https://www.cnblogs.com/Roboduster/p/16459139.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

在实际应用中DQN会引起高估,进而影响动作的正确选择。本文介绍的高估问题解决办法为:Target Network & Double DQN.
11. Target Network & Double DQN
11.1 Bootstraps \ 自举
自举通俗来说就是自己把自己举起来,这在现实物理学中是很荒唐的,但在统计学和强化学习中是可以做到自举的。
在强化学习中,自举 的意思是用一个估算去更新同类的估算,即自己把自己举起来。
之前我们提到:
- 用 transition (st,at,rt,st+1)(st,at,rt,st+1) 更新一次 w。
- TD target: yt=rt+γ⋅maxaQ(st+1,a;w)yt=rt+γ⋅maxaQ(st+1,a;w)
- TD error: δt=Q(st,at;w)−ytδt=Q(st,at;w)−yt
- 梯度下降,更新参数: w←w−α⋅δt⋅∂Q(st,at;w)∂ww←w−α⋅δt⋅∂Q(st,at;w)∂w
我们注意一下TD target,ytyt 中含有部分真实 也含有 部分DQN 在 t+1 时刻的估计。而梯度下降中的 δtδt 中含有 ytyt 。
这说明我们为了更新 t 时刻的估计,而用到了 t+1 时刻的预测。
这就是一个估计值更新其本身,也就是自己把自己举起来,bootstraping.
11.2 Overestimation
用TD算法训练DQN,会导致DQN往往高估真实的动作价值;下面来介绍一下 高估问题产生的原因。
- 计算TD target 使用了最大化 max,使得 TD target 比真实的动作价值大。
- Bootstrapping,用自己的估计更新自己,高估引发更离谱的高估;

a. 最大化
举个例子来说明为什么使用最大化会产生高估:
假设我们观测到了任意 n 个实数 x1,x2,...,xnx1,x2,...,xn;向其中加入均值是 0 的噪声,得到 Q1,Q2,...,QnQ1,Q2,...,Qn;
加入噪声这件事会造成:
- 均值不变,即:E[meani(Qi)]=meani(xi)E[meani(Qi)]=meani(xi);
- 最大值的均值更大,即:E[maxi(Qi)]≥maxi(xi)E[maxi(Qi)]≥maxi(xi);
- 最小值的均值更小,即:E[mini(Qi)]≤mini(xi)E[mini(Qi)]≤mini(xi)
这些结论可以自己带入数字验证,都有相关的定理支撑。
简单的解释是,加入噪声从信号图的角度来讲,让上下限更宽,所以有以上结论。
下面来看看这个原理投射在TD 算法上的:
-
真实的动作价值为(虽然我们不知道,但是其存在):x(a1),...,x(an)x(a1),...,x(an)
-
我们用DQN估算真实的动作价值,噪声就是由 DQN 产生的:Q(s,a1;w),...,Q(s,an;w)Q(s,a1;w),...,Q(s,an;w);
-
如果 DQN 对于真实价值的估计是 无偏的,那么 误差 就相当于上文的均值为0的 噪声 ;
meana(x(a))=meana(Q(s,a;w))meana(x(a))=meana(Q(s,a;w))
-
而根据上面的举例,maxaQ(s,a;w)≥maxa(x(a))maxaQ(s,a;w)≥maxa(x(a));意思就是,DQN的预测q: maxaQ(s,a;w)maxaQ(s,a;w),是对真实情况的高估。
-
那么,根据 yt=rt+γ⋅qt+1yt=rt+γ⋅qt+1,ytyt 较真实情况也高估了。
-
TD 算法本身的思想就是,让预测接近 TD target,更新之后的 DQN 预测也会高估。
-
TD target 用到了 t+1 时刻的估计:qt+1=maxaQ∗(st+1,a;w)qt+1=maxaQ∗(st+1,a;w);
-
而使用 TD target 在 t+1 时刻的估计 qt+1qt+1 来更新 t 时刻的估计,用DQN 来更新 DQN 自己,这样 bootstrapping 会导致高估更严重:
-
向高估方向连续进行了两次运算,
yt=rt+γ⋅maxaQ(st+1,a;w)yt=rt+γ⋅maxaQ(st+1,a;w),分别是:
- Q 处就是 DQN 对 t+1 时刻的高估
- 在计算 ytyt 的时候,最大化又导致了高估
- 两次高估是同向的;
- 通过TD 算法将这种高估传播回 DQN,DQN的高估更严重了
- 循环往复,正反馈
-
c. 高估为什么有害
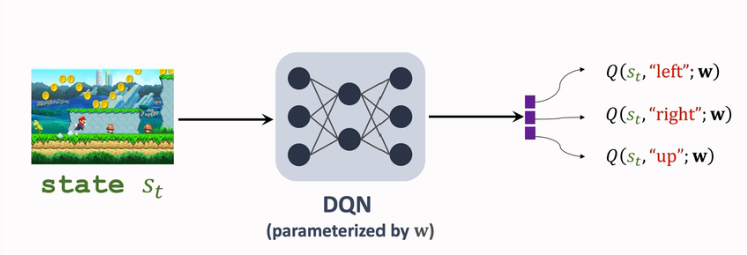
回顾 DQN / 价值学习 的基本思想:在当前状态 stst 的情况下,通过DQN输出各个动作的分数,从中挑选分数相对最高的动作执行。
如果高估这个现象对于所有动作是均匀的,那么不影响本该被选中的动作被选中。所以高估本身没有问题,有害的是不均匀的高估。
实际上 DQN 的高估就是非均匀的:
- 使用一个transition (st,at,rt,st+1)(st,at,rt,st+1) 去更新 w;
- TD target ytyt现在高估了真实情况
- TD 算法鼓励 QDN 的预测接近 ytyt,
- 那么更新参数后,TD 算法把 QDN 对于Q-star的估值推高
- 所以,重点来了,当某组 transition(包含状态和动作 s&a 的二元组) 每被用来更新一次DQN,就会让DQN倾向于高估s和a的价值;
- 而这个二元组在 Reply Buffer 中的频率不均匀,这种不均匀导致高估的不均匀。
11.3 解决方案
介绍高估问题的两种解决方案:
- 第一种是避免 Bootstrapping ,即不要用 DQN 自己的 TD target 跟新DQN,而是使用另一个神经网络 Target Network。
- 另一种思路是用Double DQN,用来缓解最大化造成的高估;虽然也使用 Target Network,但用法有所不同。
a. Target Network
这里我们引入 另一个神经网络 Target Network Q(s,a,w−)Q(s,a,w−),TN 的结构与 DQN 一样,但是参数 ww 不同。另外两者的用途也不同,DQN用来收集 transitions,控制 agent 运动,而 TN 只用来 计算 TD target。
将 TN 用在 TD 算法上:
-
用 Target Network 更新 TD Target:yt=rt+γ⋅ maxaQ(st+1,a;w−)yt=rt+γ⋅maxaQ(st+1,a;w−)
-
DQN 计算TD error:δt=Q(st,at;w)−ytδt=Q(st,at;w)−yt
-
梯度下降更新参数: w←w−α⋅δt⋅∂Q(st,at;w)∂ww←w−α⋅δt⋅∂Q(st,at;w)∂w
注意这里更新的是 DQN 的 w,没有更新 TN 的 w−w−
-
w−w− 每隔一段时间更新,更新方式有很多种:
- 直接: w−←ww−←w
- 加权平均:w−←τ⋅w+(1−τ)⋅w−w−←τ⋅w+(1−τ)⋅w−
由于 TN 还是需要 DQN 的参数,不是完全独立,所以不能完全避免Bootstrapping.
b. Double DQN
原始算法:
- 计算TD target 的第一步是选择:a∗=argmaxaQ(st+1,a;w)a∗=argmaxaQ(st+1,a;w),这一步是使用 DQN自己;
- 计算 yt=rt+γ⋅maxaQ(st+1,a∗;w)yt=rt+γ⋅maxaQ(st+1,a∗;w)
- 这种算法最差
使用 TN:
- 计算TD target 的第一步是选择:a∗=argmaxaQ(st+1,a;w−)a∗=argmaxaQ(st+1,a;w−),这一步是使用 TN;
- 计算 yt=rt+γ⋅Q(st+1,a∗;w−)yt=rt+γ⋅Q(st+1,a∗;w−)
- 较于第一种较好,但仍存在高估;
Double DQN:
- 选择:a∗=argmaxaQ(st+1,a;w)a∗=argmaxaQ(st+1,a;w),注意这一步是 Double DQN;
- 计算:yt=rt+γ⋅Q(st+1,a∗;w−)yt=rt+γ⋅Q(st+1,a∗;w−);这一步使用 TN;
- 可见改动非常小,但是改进效果显著。(没有消除高估)
为什么呢?
Q(st+1,a∗;w−)≤maxaQ(st+1,a;w−)Q(st+1,a∗;w−)≤maxaQ(st+1,a;w−)
- 因为右边是求了最大化,所以右边一定比左边大;
- 而左边是 Double DQN作出的估计,右边是 TN 算出来的;
- 这个式子说明: Double DQN 作出的估计更小,所以缓解了 高估问题;
x. 参考教程
Recommend
-
4
Value-Based Reinforcement Learning : 价值学习 2. 价值学习 2.1 Deep Q-Network DQN 其实就是用一个神经网络来近似 Q∗Q∗ 函数。 agent...
-
2
Actor-Critic 是价值学习和策略学习的结合。Actor 是策略网络,用来控制agent运动,可以看做是运动员。Critic 是价值网络,用来给动作打分,像是裁判。 4. Actor-Critic 4.1 价值网络与策略网...
-
7
Monte Carlo Algorithms. 蒙特卡洛算法是一大类随机算法,又称为随机抽样或统计试验方法,通过随机样本估计真实值。 下面用几个实例来理解蒙特卡洛算法。 6. 蒙特卡洛算法 6.1 计算
-
6
这是价值学习高级技巧第三篇,前两篇主要是针对 TD 算法的改进,而Dueling Network 对 DQN 的结构进行改进,能够大幅度改进DQN的效果。 Dueling Network 的应用范围不限于 DQN,本文只介绍其在 DQN上的应用。
-
5
这一篇介绍重头戏:多智能体强化学习。多智能体要比之前的单智能体复杂很多。但也更有意思。 13. Multi-Agent-Reiforcement-Learning 13.1 多智能体关系设定 ...
-
7
本系列的完结篇,介绍了连续控制情境下的强化学习方法,确定策略 DPG 和随机策略 AC 算法。 15. 连续控制 15.1 动作空间 离散动作空间 Action space A=left,right,up ...
-
5
Movelt为使用者提供了一个最通用且简单的接口 MoveGroupInterface 类,这个接口提供了很多控制...
-
3
目标是做一个机械臂视觉抓取的demo,在基地里翻箱倒柜,没有找到学长所说的 d435,倒是找到了一个老古董 kinect 360。 前几天就已经在旧电脑上配置好了,现在记录在新电脑上的配置过程。 1. kinect 相机驱动安装 ...
-
6
在上一部分中,我们了解到操作系统实现多进程图像需要组织、切换、考虑进程之间的影响,组织就是用PCB的队列实现,用到了一些简单的数据结构知识。而本部分重点就是进程之间的切换。 参考资料: 课程:哈工大操作系统(本部分对应 L1...
-
7
操作系统是一个复杂系统,将来还会面对很多复杂系统,希望通过对操作系统的学习,形成对复杂系统的研究和开发能力。 本部分还介绍了一个实际的调度算法,理解操作系统调度的考虑因素和实现方法。 参考资料:...
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK