

Yufan's Blog - CV 常见 CNN 模型合集和基于 TensorFlow 的实现 - Part III
source link: https://alphafan.github.io/posts/famous_cnn_3.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

上一篇博客介绍了 GoogLeNet, GoogLeNet 有一个另外的名字,叫做 Inception-v1,那么既然有 v1,肯定就会有一个系列紧随其后,这篇博客首先介绍一下 Inception 系列的进化过程,和另外一个牛逼哄哄的网络 ResNet。
Inception-V2(Sergey Ioffe,2015)
不得不说,谷歌的团队就是厉害,在 GoogLeNet 发明后,不停的对它进行改良,发表了一个又一个更加厉害的网络。
Inception-V2 是 GoogLeNet 的第一个改良版,与前一个版本相比,它的主要变化总结起来有两个:
-
1. 加入了 BN (Batch Normalization)层,增加了这一层的好处有:
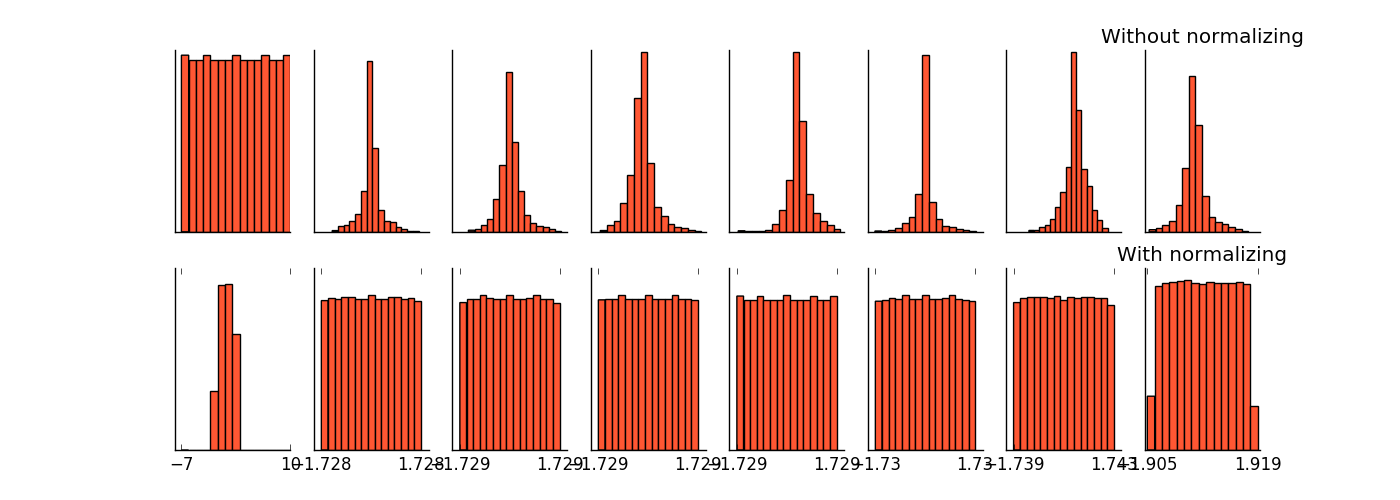
- 1. 1 减少了 Internal Covariate Shift(内部 neuron 的数据分布发生变化),使每一层的输出都规范化到一个 N ( 0 , 1 ) 的高斯。下图展示了加入了 Batch Normalization 和没有加入 BN 层的产生的权值分布的变化图。
- 1. 2 增加了模型的鲁棒性,可以以更大的学习速率训练,收敛更快,初始化操作更加随意。
- 1. 3 作为一种正则化技术,可以减少 dropout 层的使用。
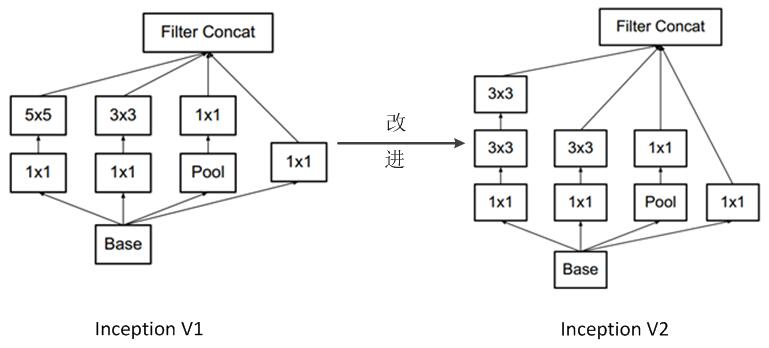
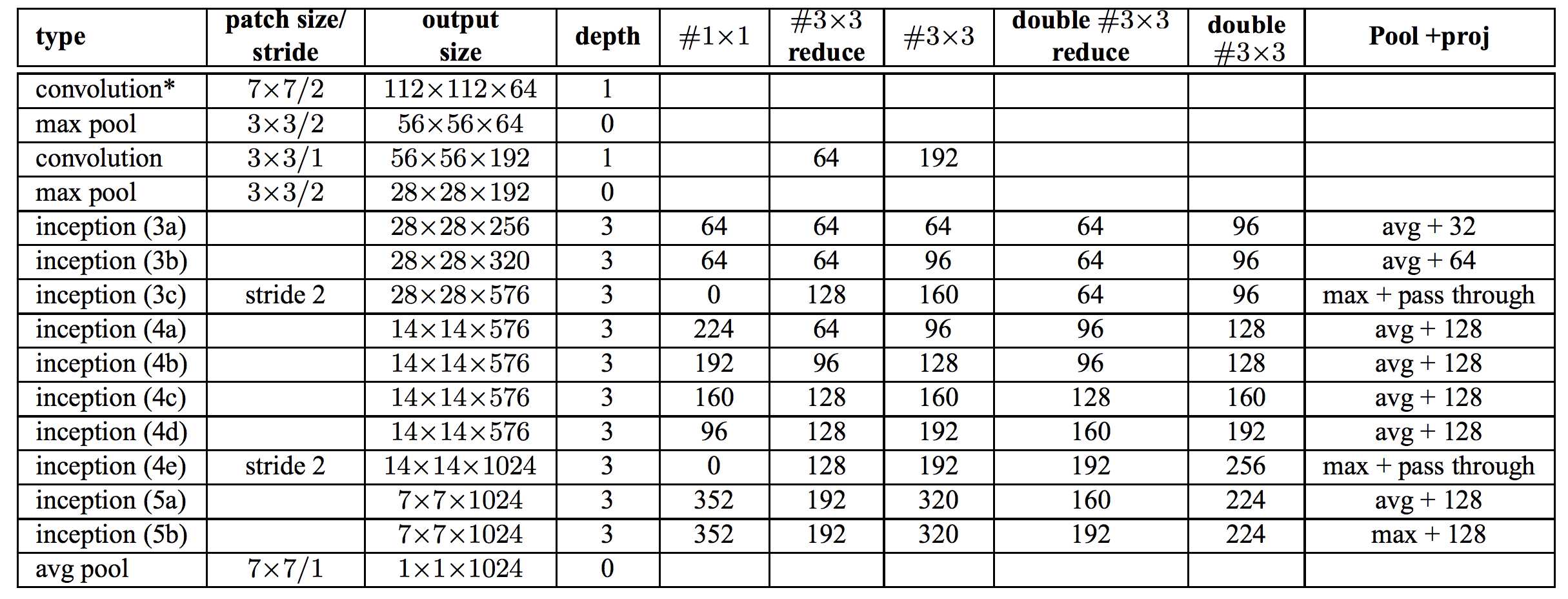
Inception-V2 的架构图如下
Inception-V3(Sergey Ioffe,2015)
Inception-V3 网络,主要在 V2 的基础上,提出了卷积分解(Factorization)的概念,为什么要提出这个概念呢?主要是为了在保持特征提取性能的同事,减少计算量。
那么卷积分解(Factorization),具体是怎么做的呢?看下面两个例子。
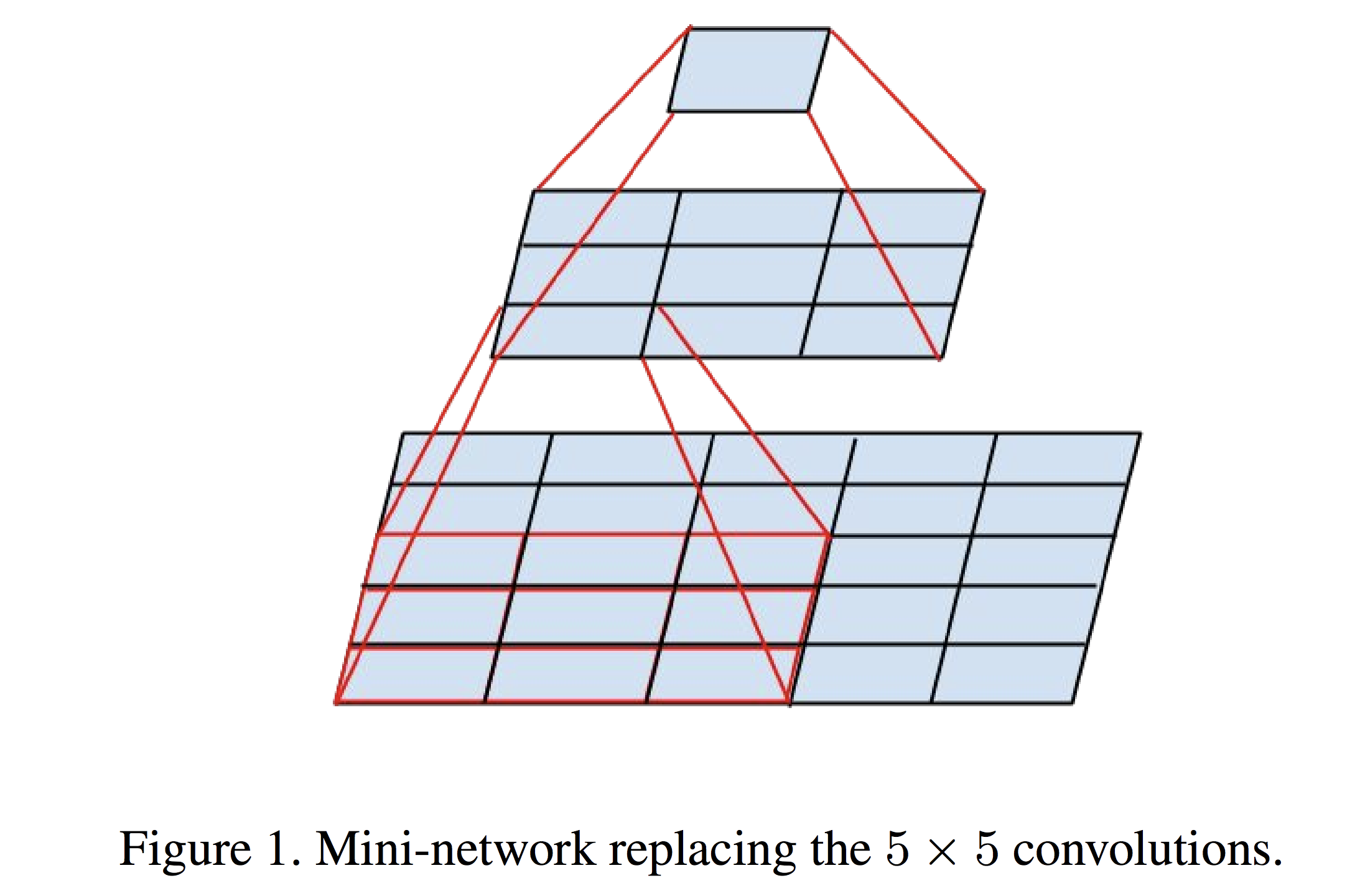
1. 对于 “ 大 ” 的卷积核,例如下图的 5 x 5 的卷积核,将其转换成两个 3 x 3 的卷积核,这样,需要计算的参数量就是之前的 18 / 25。
2. 对于 “ 小 ” 的卷积核,例如下图的 3 x 3 的卷积核,将其转换成 1 x 3 和 3 x 1 的卷积核,这样,需要计算的参数量就是之前的 2 / 3。这里需要注意的是,为什么不用两个 2 x 2 的卷积核来分解呢?原因是两个 2 x 2 的卷积核只能减少 1 / 9 的计算量。而 1 x 3 却能减少 1 / 3 的计算量。
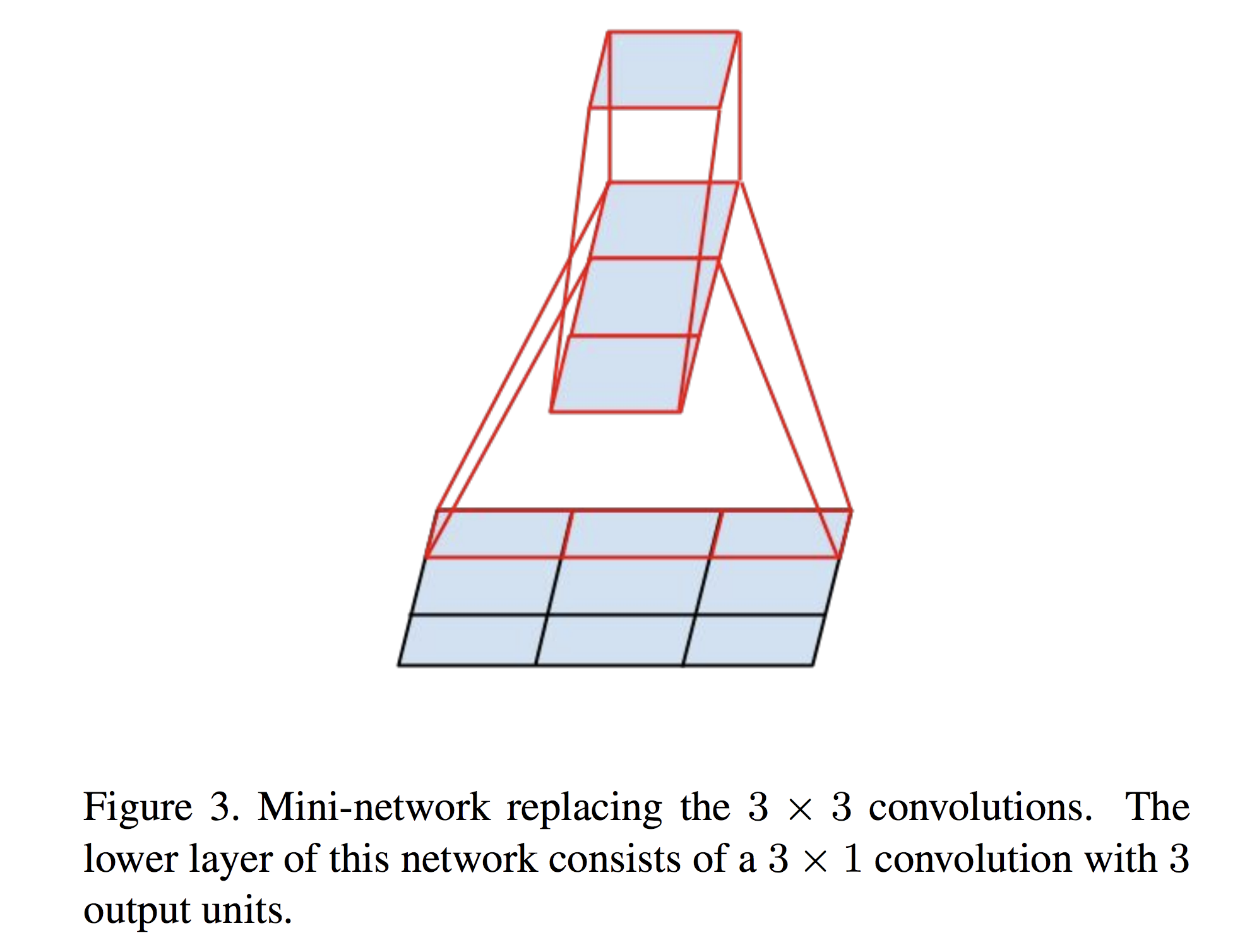
作者提出,在实际运用中,太早的时候用 1 x 3 和 3 x 1 的卷积核效果不好,所以在网络的前期,往往采用 1 x 7 和 7 x 1 的尺度。
好,回归正题,在 Inception-V3 中,卷积分解(Factorization)具体是怎么做的呢?其实在 V3 模型中,他们一共用到了 “ 三种 ” 不同的 Inception 的结构。对应在架构中的位置分别如下。
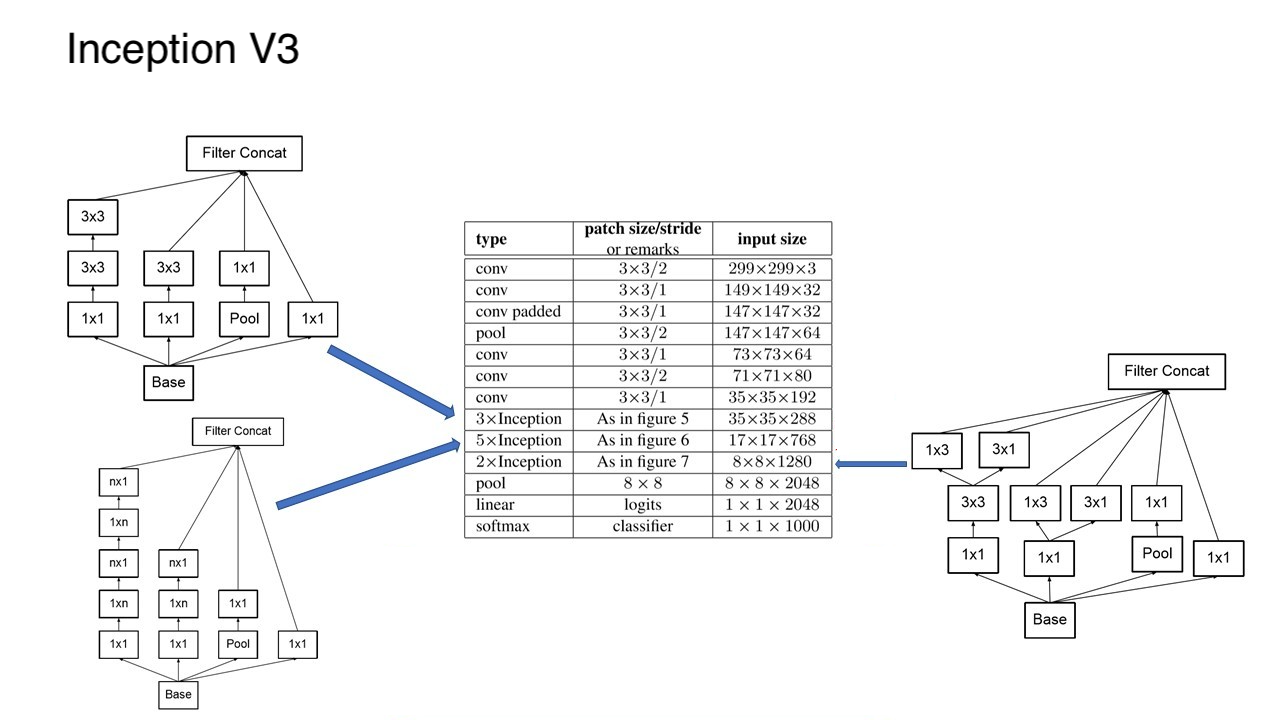
=> 第一个 Inception 和 V2 中的一样,只是将 V1 版本中的 5 x 5 卷积替换成了两个 3 x 3
=> 第二个 Inception 进行了横向和纵向的因式分解,将 n x n 分解成了 n x 1 和 1 x n。
=> 第三个 Inception 将 3 x 3 的卷积核进行了再次拆解。
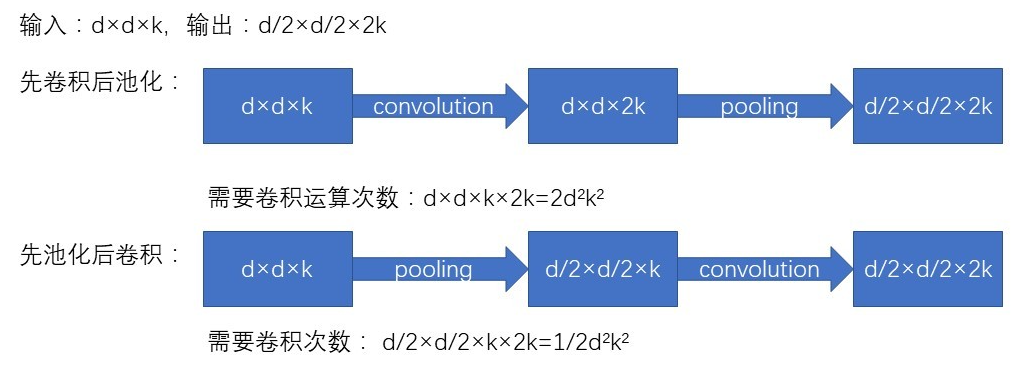
为了进一步的减少计算量,在 Inception 层与层之间的结构,也进行了网格大小的优化。卷积网络通过池化层来减少特征图的 Grid Size,而交换卷积层和池化层的位置,可以减少计算量。例如:
Inception V3 中对比了两种模型,他们的区别是,到底是先做 Inception 再做 Pooling 呢?还是先做 Pooling 再做 Inception 呢?
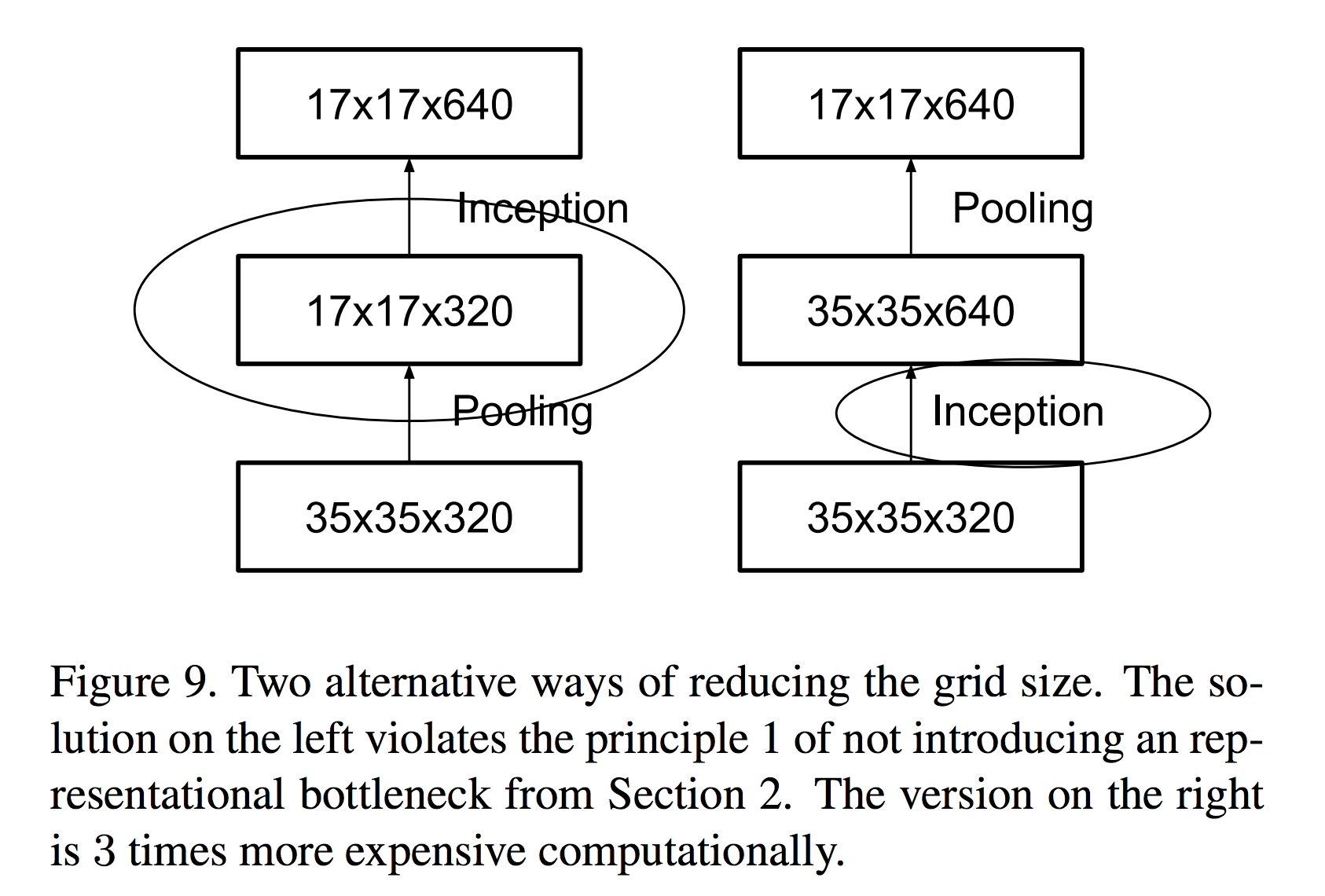
左边的做法,不满足 representional bottleneck 原则,即是,在网络的前期,不宜下降的太快。右边虽然满足了这个原则,但是计算量却是左边的 3 倍。
为了解决这个冲突,Inception-V3 提出了一个能同时满足两个优势的模型,如下图。

那么,加上这个层与层之间的连接模块,Inception-V3 的最终版本终于浮出了水面,它的最终结构如下图。
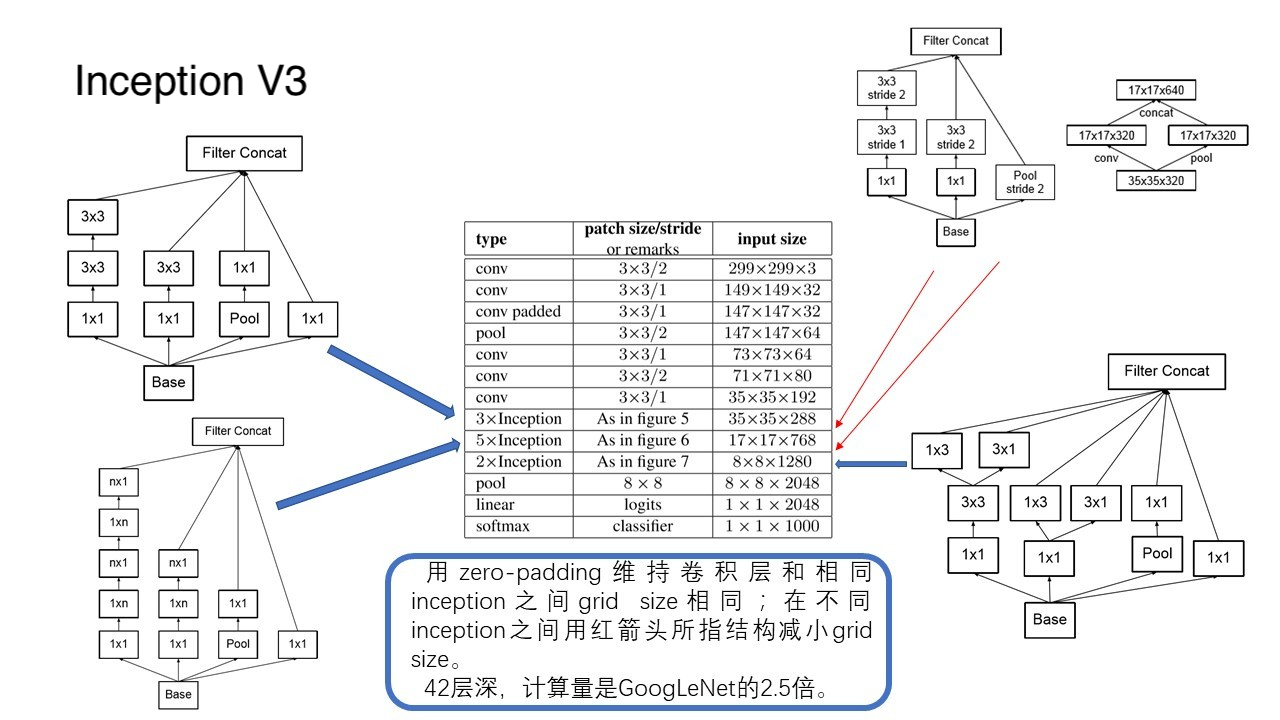
注意到,Inception-V3 相比于 GoogLeNet,层数达到了 42 层,是原来的 2.5 倍,已经深到作者都无法在 paper 中画出来了,只能靠粗略的简图概略结构了。(GoogLeNet 的论文中是有它的完整层次结构的。)
ResNet (Kaiming He, 2015)
这里先不介绍 Inception-V4, 因为要理解 Inception-v4 的话,必须要先弄明白 ResNet 的概念,因为实际上 Inception-V4 主要就是看到ResNet觉得挺好,就拿来和 Inception 模块结合一下,加 shortcut。
深度残差网络(Deep residual network, ResNet)的提出是CNN图像史上的一件里程碑事件,让我们先看一下ResNet在ILSVRC和COCO 2015上的战绩:
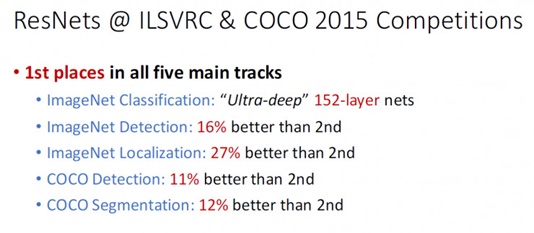
图1 - ResNet 取得了5项第一,并又一次刷新了 CNN 模型在 ImageNet 上的历史
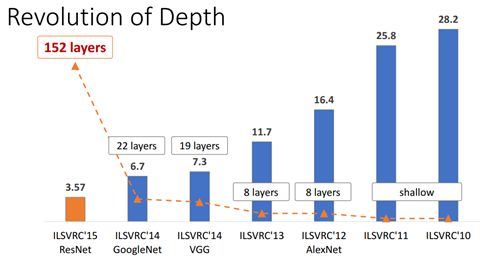
图2 - ImageNet 分类 Top-5 误差
ResNet 的作者何凯明也因此摘得 CVPR2016 最佳论文奖,当然何博士的成就远不止于此,感兴趣的可以去搜一下他后来的辉煌战绩。那么 ResNet 为什么会有如此优异的表现呢?其实 ResNet 是解决了深度 CNN 模型难训练的问题,从图2中可以看到14年的VGG才19层,而 15 年的 ResNet 多达 152 层,这在网络深度完全不是一个量级上,所以如果是第一眼看这个图的话,肯定会觉得 ResNet 是靠深度取胜。事实当然是这样,但是 ResNet 还有架构上的 trick,这才使得网络的深度发挥出作用,这个 trick 就是残差学习(Residual learning)。下面详细讲述 ResNet 的理论及实现。
- 深度网络的退化问题
从经验来看,网络的深度对模型的性能至关重要,当增加网络层数后,网络可以进行更加复杂的特征模式的提取,所以当模型更深时理论上可以取得更好的结果,从图2中也可以看出网络越深而效果越好的一个实践证据。但是更深的网络其性能一定会更好吗?实验发现深度网络出现了退化问题(Degradation problem):网络深度增加时,网络准确度出现饱和,甚至出现下降。这个现象可以在图3中直观看出来:56层的网络比20层网络效果还要差。这不会是过拟合问题,因为56层网络的训练误差同样高。我们知道深层网络存在着梯度消失或者爆炸的问题,这使得深度学习模型很难训练。但是现在已经存在一些技术手段如BatchNorm来缓解这个问题。因此,出现深度网络的退化问题是非常令人诧异的。
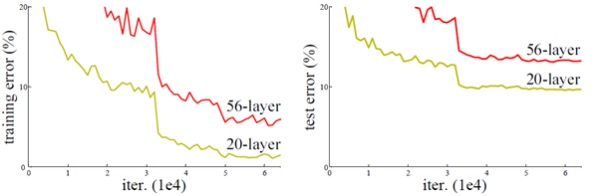
图3 - 20层与56层网络在CIFAR-10上的误差
- 残差学习
深度网络的退化问题至少说明深度网络不容易训练。但是我们考虑这样一个事实:现在你有一个浅层网络,你想通过向上堆积新层来建立深层网络,一个极端情况是这些增加的层什么也不学习,仅仅复制浅层网络的特征,即这样新层是恒等映射(Identity mapping)。在这种情况下,深层网络应该至少和浅层网络性能一样,也不应该出现退化现象。好吧,你不得不承认肯定是目前的训练方法有问题,才使得深层网络很难去找到一个好的参数。
这个有趣的假设让何博士灵感爆发,他提出了残差学习来解决退化问题。对于一个堆积层结构(几层堆积而成)当输入为 时其学习到的特征记为
,现在我们希望其可以学习到残差
,这样其实原始的学习特征是
。之所以这样是因为残差学习相比原始特征直接学习更容易。当残差为0时,此时堆积层仅仅做了恒等映射,至少网络性能不会下降,实际上残差不会为0,这也会使得堆积层在输入特征基础上学习到新的特征,从而拥有更好的性能。残差学习的结构如图4所示。这有点类似与电路中的“短路”,所以是一种短路连接(shortcut connection)。

图4 - 残差学习单元
为什么残差学习相对更容易,从直观上看残差学习需要学习的内容少,因为残差一般会比较小,学习难度小点。不过我们可以从数学的角度来分析这个问题,首先残差单元可以表示为:
其中 和
分别表示的是第
个残差单元的输入和输出,注意每个残差单元一般包含多层结构。
是残差函数,表示学习到的残差,而
表示恒等映射,
是ReLU激活函数。基于上式,我们求得从浅层
到深层
的学习特征为:
利用链式规则,可以求得反向过程的梯度:
式子的第一个因子 表示的损失函数到达
的梯度,小括号中的1表明短路机制可以无损地传播梯度,而另外一项残差梯度则需要经过带有weights的层,梯度不是直接传递过来的。残差梯度不会那么巧全为-1,而且就算其比较小,有1的存在也不会导致梯度消失。所以残差学习会更容易。要注意上面的推导并不是严格的证明。
- 直观理解为什么残差学习单元可以防止梯度消失。
首先,来看一下为什么会消失。我们知道,神经网络的训练无非就是前向传播和后向传播的过程,既然是传播,传递的过程中,总是会有损耗的,损耗过大,那么后面就接收不到什么东西了,也就更谈不上能学到东西,深度,也就没有了意义。
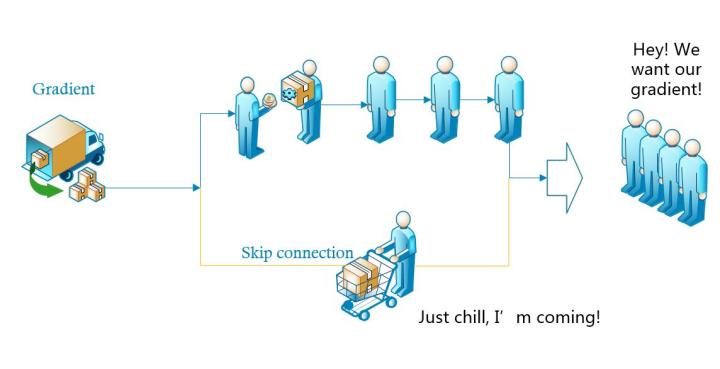
如上图,左边来了一辆装满了“梯度”商品的货车,来领商品的客人一般都要排队一个个拿才可以,如果排队的人太多,后面的人就没有了。于是这时候派了一个人走了“快捷通道”,到货车上领了一部分“梯度”,直接送给后面的人,这样后面排队的客人就能拿到更多的“梯度”。
- ResNet的网络结构
ResNet网络是参考了VGG19网络,在其基础上进行了修改,并通过短路机制加入了残差单元,如图5所示。变化主要体现在ResNet直接使用stride=2的卷积做下采样,并且用global average pool层替换了全连接层。ResNet的一个重要设计原则是:当feature map大小降低一半时,feature map的数量增加一倍,这保持了网络层的复杂度。从图5中可以看到,ResNet相比普通网络每两层间增加了短路机制,这就形成了残差学习,其中虚线表示feature map数量发生了改变。图5展示的34-layer的ResNet,还可以构建更深的网络如表1所示。从表中可以看到,对于18-layer和34-layer的ResNet,其进行的两层间的残差学习,当网络更深时,其进行的是三层间的残差学习,三层卷积核分别是1x1,3x3和1x1,一个值得注意的是隐含层的feature map数量是比较小的,并且是输出feature map数量的1/4。
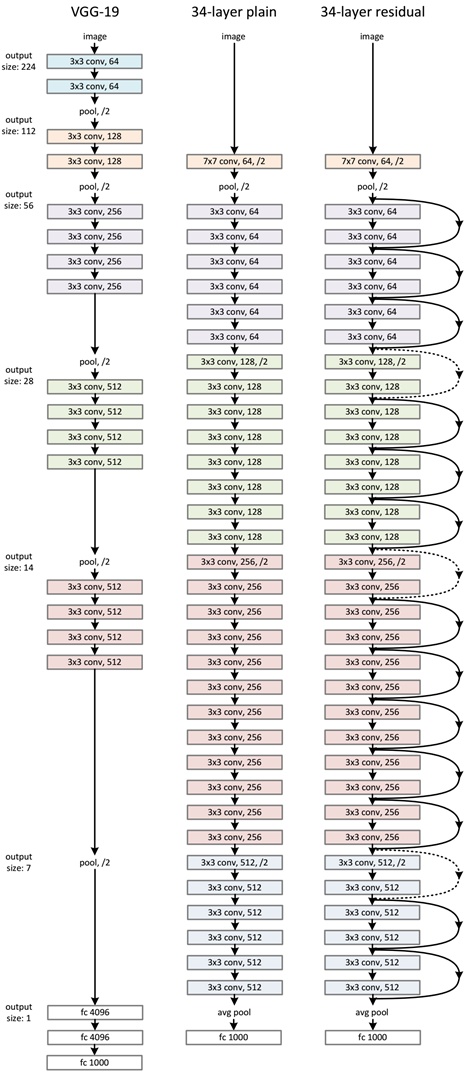
图5 - ResNet网络结构图
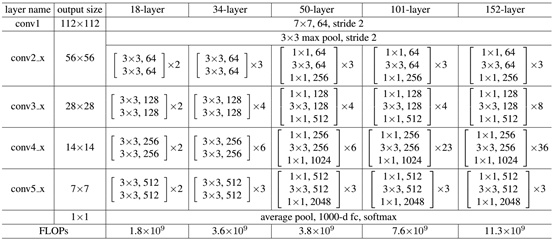
表1 - 不同深度的ResNet
下面我们再分析一下残差单元,ResNet使用两种残差单元,如图6所示。左图对应的是浅层网络,而右图对应的是深层网络。对于短路连接,当输入和输出维度一致时,可以直接将输入加到输出上。但是当维度不一致时(对应的是维度增加一倍),这就不能直接相加。有两种策略:
- 1. 采用zero-padding增加维度,此时一般要先做一个downsamp,可以采用strde=2的pooling,这样不会增加参数;
- 2. 采用新的映射(projection shortcut),一般采用1x1的卷积,这样会增加参数,也会增加计算量。短路连接除了直接使用恒等映射,当然都可以采用projection shortcut。
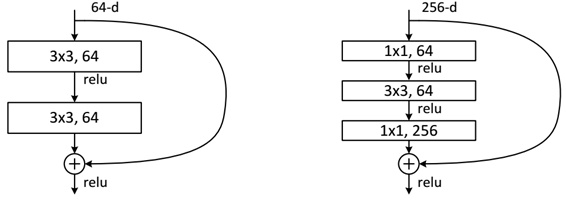
图6 - 不同的残差单元
作者对比18-layer和34-layer的网络效果,如图7所示。可以看到普通的网络出现退化现象,但是ResNet很好的解决了退化问题。

图7 - 18-layer和34-layer的网络效果
最后展示一下ResNet网络与其他网络在ImageNet上的对比结果,如表2所示。可以看到ResNet-152其误差降到了4.49%,当采用集成模型后,误差可以降到3.57%。
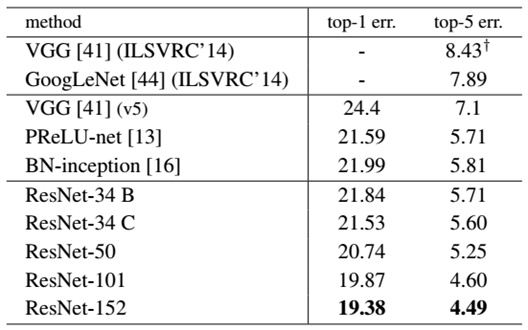
表2 - ResNet与其他网络的对比结果
说一点关于残差单元题外话,上面我们说到了短路连接的几种处理方式,其实作者在文献中又对不同的残差单元做了细致的分析与实验,这里我们直接抛出最优的残差结构,如图8所示。改进前后一个明显的变化是采用pre-activation,BN和ReLU都提前了。而且作者推荐短路连接采用恒等变换,这样保证短路连接不会有阻碍。感兴趣的可以去读读这篇文章。
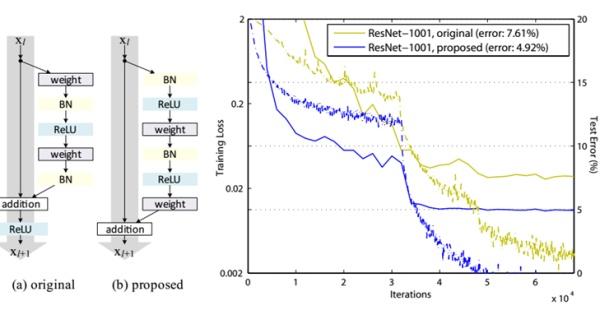
图8 - 改进后的残差单元及效果
Implement ResNet In TensorFlow
这里给出ResNet50的TensorFlow实现,模型的实现参考了Caffe版本的实现,核心代码如下:
class ResNet50(object):
def __init__(self, inputs, num_classes=1000, is_training=True,
scope="resnet50"):
self.inputs =inputs
self.is_training = is_training
self.num_classes = num_classes
with tf.variable_scope(scope):
# construct the model
net = conv2d(inputs, 64, 7, 2, scope="conv1") # -> [batch, 112, 112, 64]
net = tf.nn.relu(batch_norm(net, is_training=self.is_training, scope="bn1"))
net = max_pool(net, 3, 2, scope="maxpool1") # -> [batch, 56, 56, 64]
net = self._block(net, 256, 3, init_stride=1, is_training=self.is_training,
scope="block2") # -> [batch, 56, 56, 256]
net = self._block(net, 512, 4, is_training=self.is_training, scope="block3")
# -> [batch, 28, 28, 512]
net = self._block(net, 1024, 6, is_training=self.is_training, scope="block4")
# -> [batch, 14, 14, 1024]
net = self._block(net, 2048, 3, is_training=self.is_training, scope="block5")
# -> [batch, 7, 7, 2048]
net = avg_pool(net, 7, scope="avgpool5") # -> [batch, 1, 1, 2048]
net = tf.squeeze(net, [1, 2], name="SpatialSqueeze") # -> [batch, 2048]
self.logits = fc(net, self.num_classes, "fc6") # -> [batch, num_classes]
self.predictions = tf.nn.softmax(self.logits)
def _block(self, x, n_out, n, init_stride=2, is_training=True, scope="block"):
with tf.variable_scope(scope):
h_out = n_out // 4
out = self._bottleneck(x, h_out, n_out, stride=init_stride,
is_training=is_training, scope="bottlencek1")
for i in range(1, n):
out = self._bottleneck(out, h_out, n_out, is_training=is_training,
scope=("bottlencek%s" % (i + 1)))
return out
def _bottleneck(self, x, h_out, n_out, stride=None, is_training=True, scope="bottleneck"):
""" A residual bottleneck unit"""
n_in = x.get_shape()[-1]
if stride is None:
stride = 1 if n_in == n_out else 2
with tf.variable_scope(scope):
h = conv2d(x, h_out, 1, stride=stride, scope="conv_1")
h = batch_norm(h, is_training=is_training, scope="bn_1")
h = tf.nn.relu(h)
h = conv2d(h, h_out, 3, stride=1, scope="conv_2")
h = batch_norm(h, is_training=is_training, scope="bn_2")
h = tf.nn.relu(h)
h = conv2d(h, n_out, 1, stride=1, scope="conv_3")
h = batch_norm(h, is_training=is_training, scope="bn_3")
if n_in != n_out:
shortcut = conv2d(x, n_out, 1, stride=stride, scope="conv_4")
shortcut = batch_norm(shortcut, is_training=is_training, scope="bn_4")
else:
shortcut = x
return tf.nn.relu(shortcut + h)完整实现可以参见GitHub。
References
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK