

Yufan's Blog - DL 常见的梯度下降 Optimizer 详解
source link: https://alphafan.github.io/posts/grad_desc.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

有人在我微信分享下来回复说想让我写梯度下降算法啦,哈哈,开心,说明我写的东西是有观众的,而且还是能帮助到一些人的。那么这篇文章我一定好好写,不负所托。
梯度下降,可以说是深度学习的基础中的基础了,前向传播,搭建网络框架,后向传播,梯度下降训练,就成了一个神经网络的全部过程。
梯度下降的算法有很多,这里,我不会将所有的算法都涉及到,但这里所谈到的优化器算法,可能是做深度学习的,一定得要知道的算法了。

据说,前面放动图,会更吸引人?
-> . <-
What is Gradient Desecnt ?
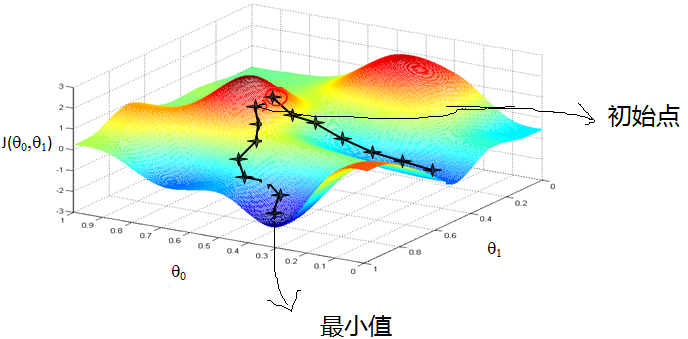
那么,什么是梯度下降呢?学习机器学习的同学们常会遇到下面这样的图像, 这个图像看上去好复杂, 不过还挺好看的,= . =。在这张图上我们做的事情是,从某一个随机的点出发,一步一步的下降到某个最小值所在的位置。
对于人来说,我们是很容易知道那条路径下降最快的,可是机器却不是那么聪明的。他们只能靠算法,找到这个最快下降的路径。这个算法,就是我们所说的梯度下降了。
其实梯度下降只是一个大的问题家族中的一员,这个家族的名字就是 - ”optimization” (优化问题)。优化能力是人类历史上的重大突破, 他解决了很多实际生活中的问题。从而渐渐演化成了一个庞大的家族.比如说牛顿法 (Newton’s method), 最小二乘法(Least Squares method), 梯度下降法 (Gradient Descent) 等等。而我们的神经网络就是属于梯度下降法这个分支中的一个。
提到梯度下降, 我们不得不说说大学里面学习过的求导求微分。因为这就是传说中”梯度下降”里面的”梯度” (gradient)啦。听到求导微分,大家不要害怕, 因为这个博客只是让你有一个直观上的理解, 并不会涉及太过复杂的数学公式推导哈。
Accelerate Gradient Desecnt
越复杂的神经网络, 就会需要越多的数据来训练, 导致我们在训练神经网络的过程中花费的时间也就越多。我们不想花费这么多的时间在训练上. 可是往往有时候为了解决复杂的问题, 复杂的结构和大数据又是不能避免的,这就让人很抓狂了。

所以我们(迫切的)需要寻找一些方法, 让神经网络聪明起来, 下降的速度快起来。常见的加速模式有以下几种:
- Stochastic Gradient Descent (SGD)
- Momentum
- AdaGrad
- RMSProp
Stochastic Gradient Descent
随机梯度下降,应该是最基础的一种加速算法了,Gradient Descent 利用全部数据,来计算梯度下降的方向,这肯定是能找到最优的下降方向,但是同时也造成了计算量过大,时间过长的后果。
我们换一种思路, 如果把这些训练数据拆分成小批小批的, 然后再分批不断放入 NN 中计算, 这就是我们常说的 SGD 的正确打开方式了. 每次使用批数据, 虽然不能反映整体数据的情况, 不过却很大程度上加速了 NN 的训练过程, 而且也不会丢失太多准确率.
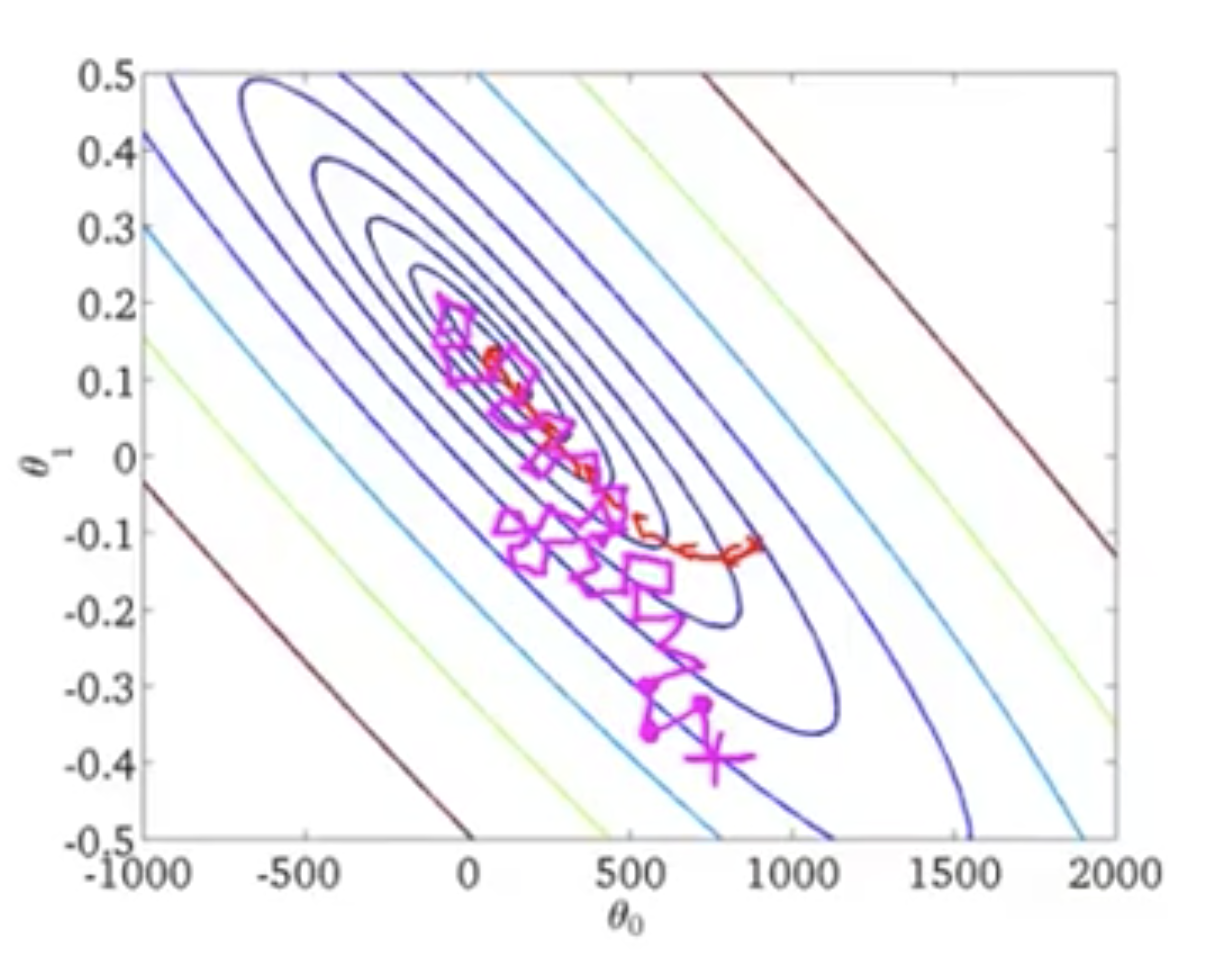
例如,上图中,如果我们是梯度下降的话,我们每一步都会走最正确的下降方向,不会走弯路,那就是图中红色线所表示的走法,如果是随机梯度下降的话,就是紫色线路所代表的走法,他可能会绕一些弯路,但是扭扭曲曲,却还是能朝着最小值的地方走过去。
注意,往往随机梯度下降,不会刚刚好就找到最小的地方,可能会在最小值附近转来转去的。
Momentum
如果说在训练的时候,我们觉得随机梯度下降 SGD 算法依然太慢了,怎么办呢?这时,我们就可以考虑使用 Momentum 了,Momentum 算法它是可以帮助到快速的梯度下降的。
在真正进入到算法讲解之前,我们先来大致看一下,在大多数训练的过程中,那些曲折无比的学习过程吧。
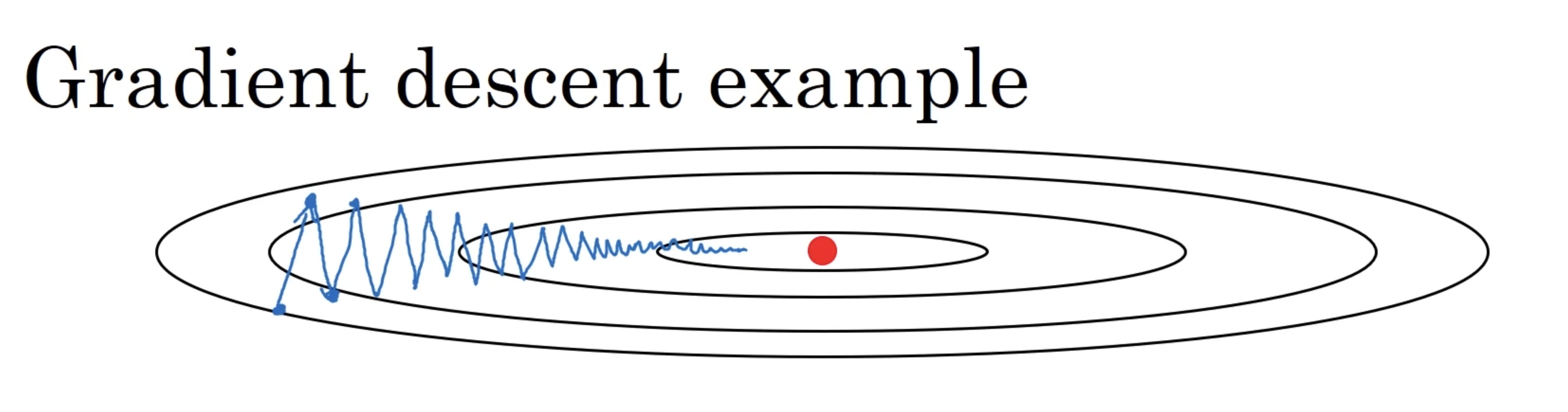
例如上图中的梯度下降的例子,这个梯度下降的过程,很像是在某一个轴附近摆来摆去,虽然确实是一直朝着中间的洼地在走着,但是好像来回的摆动确实是浪费了许多步骤,看上去像一个喝醉了的人,晃晃悠悠的向着地低走去。
实际上,由于真实的训练过程中,维度远比 2 要高的多,这种无意义的摆动的情况出现的情况,出现的次数非常多。
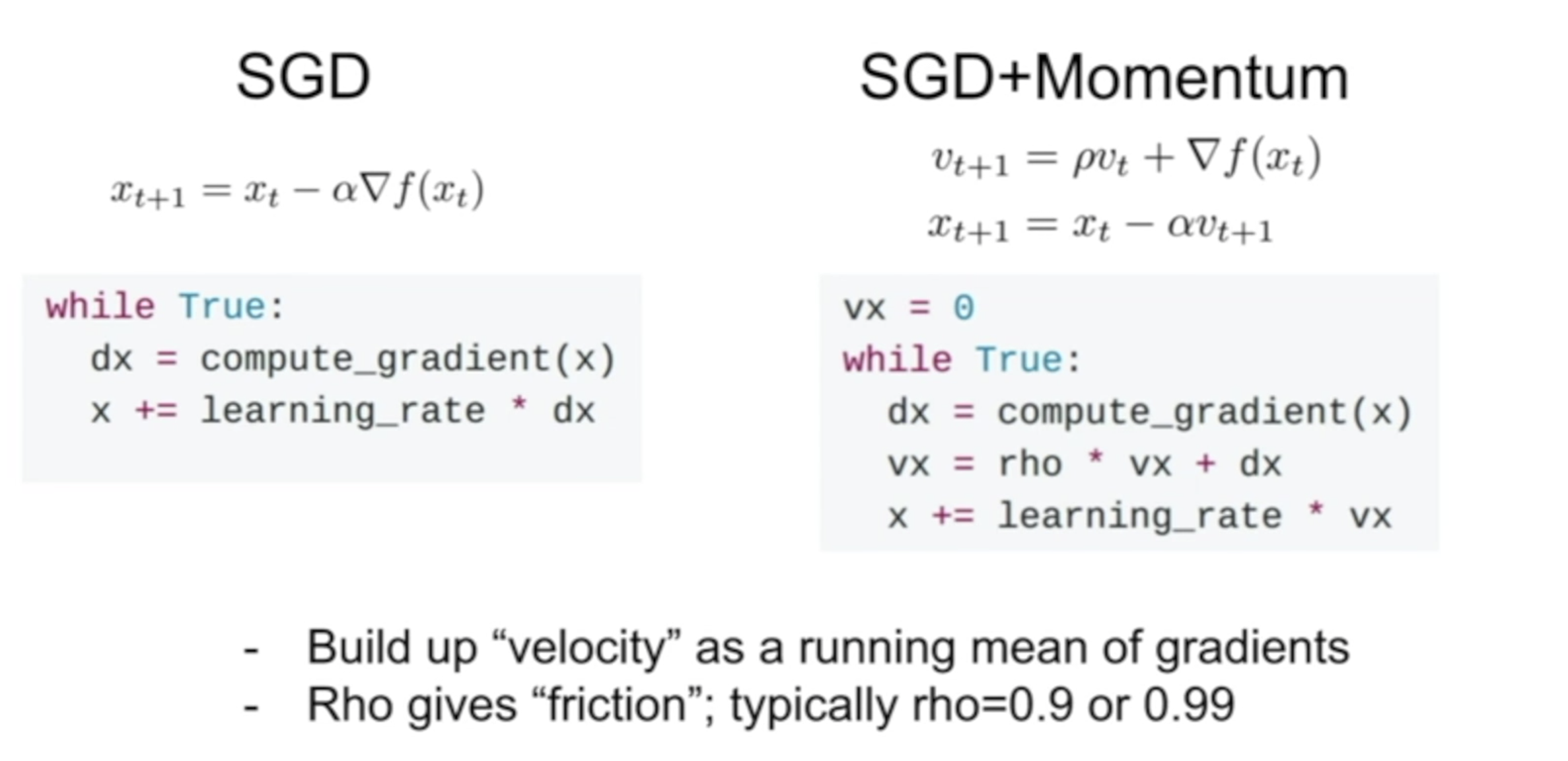
那么 Momentum 就是发现了这种问题,对 SGD 算法做了一些改进。一句话来概括它的特点的话,那就是:计算在梯度下降的方向上,计算一个指数加权平均( Exponentially weighted average ),利用这个来代替权重更新的方法。
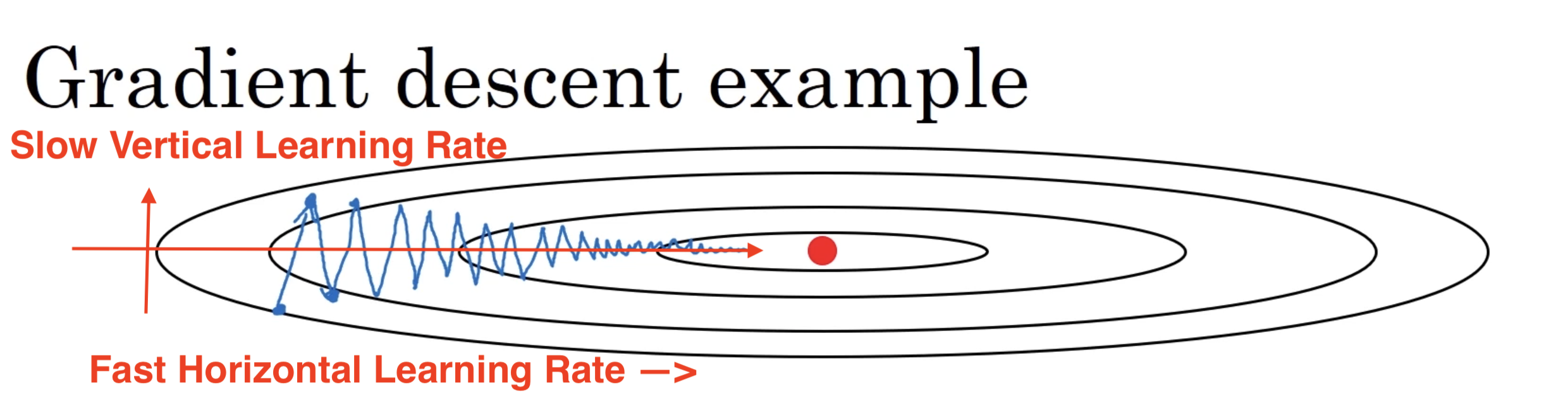
用通俗一点的方法来说,就是“如果梯度下降显示,我们在一直朝着某一个方向在下降的话,我让这个方向的的学习速率快一点,如果梯度下降在某一个方向上一直是摆来摆去的,那么就让这个方向的学习速率慢一点”。
我们可以先来看一下,Momentum 减少摆动的效果。
没有 Momentum 的 Gradient Descent
有 Momentum 的 Gradient Descent
上面两张图,就是我们没有加入,和加入了 Momentum 之后的梯度下降的变化,可以看到,有了 Momentum 之后,算法加速了横轴下降的速度,并减缓了纵轴的摆动的频率,所以在最终的训练过程中,它的步伐迈的更大,也更正确了,对比原来没有 Momentum,仅仅四步,就离最终的最小值更近了许多。
Exponentially Weighted Average
如果你只是想知道 Momentum 的大致原理,不想知道 Momentum 的细节的话,那么这一部分你是可以跳过的啦。
前面我们提到,Momentum 是用到滑动平均来获得平滑波动的效果的。那么什么是滑动平均呢?
滑动平均实际上是一种用来处理“数字序列”的方法,你们玩的股票里面的各种多少天的线,周线,月线,年线,等等,都是这种方法弄出来的。具体是怎么做的呢?假设,我们有一些带噪音的序列的序列 S。在这个例子中,我绘制了余弦函数并添加了一些高斯噪声。它看起来像这样:
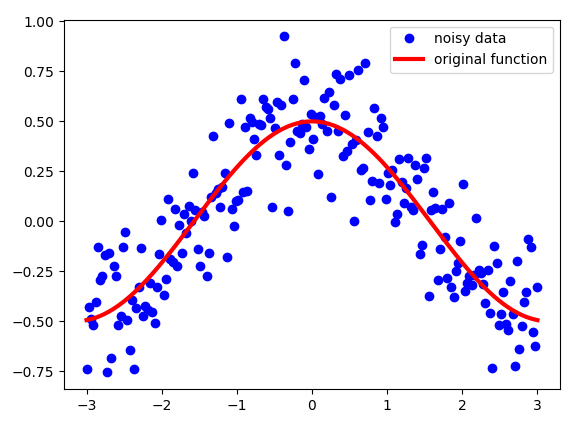
请注意,即使这些点看起来非常接近每个点,但它们都不共享 x 坐标。这是每个点的唯一编号。这是定义我们序列 S 中每个点的索引的数字。
我们想要对这些数据进行处理,而不是使用这些数据,我们需要某种“移动”平均值,这会使数据“降噪”并使其更接近原始功能。指数平均值可以给我们一张看起来像这样的图片:
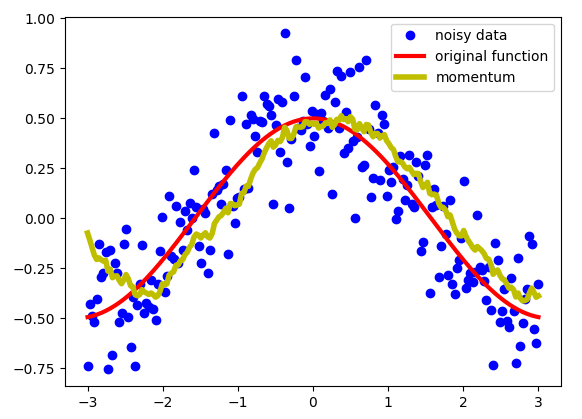
正如你所看到的那样,这是一个相当不错的结果。我们得到了更平滑的线条,而不是具有很多噪音的数据,这比我们的数据更接近原始功能。指数加权平均值用以下等式定义新的序列 V :

序列 S 是我们原始的带噪音的序列,序列 V 是我们经过滑动平均得到曲线,也就是上面绘制的黄色。 Beta 是一个从 0 到 1 的超参数。上面的 beta = 0.9。这是一个非常常用的值,最常用于带 Momentum 的 SGD。我们对序列的最后做 1 /(1- beta)进行近似平均。
让我们看看beta的选择如何影响我们的新序列 V 的吧。
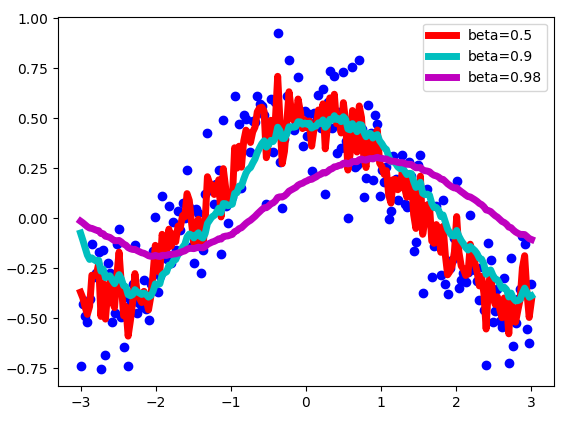
正如上图所示,beta 值越大,曲线与含有噪音的值越接近,beta 越小,曲线越平滑。
接下来,我们来一波数学公式推导吧。

如果我们一步一步的将生成新序列的方程展开的话,就会发现是这样的关系。

将下面的公式一步一步带入上面。

然后再简化一下。就得到了这样的东西。
简单说一下上面公式的意义吧,如果你不想看公式的话,其实就是说,生成的新序列,离得越近的数据,对它的影响越大,离得越远的数据,因为 beta 已经被乘了好多次方了,所以影响就小了许多,这也就是 Exponentially (指数)滑动平均的意义所在。
Why Momentum Works ?
我们已经定义了一种方法来获得某个序列的“移动”平均值,而且这种平均值会与数据一起变化。那么我们如何将它应用于训练神经网络呢?
这里,我给出 Andrew Ng 在 coursera 的 Deep Learning Specialisation 中的定义。他的解释 Momentum 的方式是,我们定义了一个动量,这个动量 Momentum 就是我们渐变的移动平均值,它会取决于前面的梯度下降的值的大小。然后我们用它来更新网络的权重。这可以写成如下:
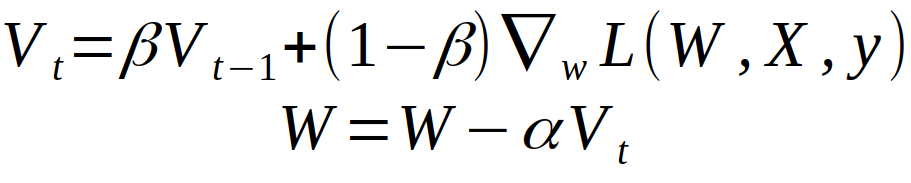
上图中的 L 是 loss function,倒三角形状的东西,是梯度,alpha 是学习速率,beta 就是控制我们滑动平均的平滑指数的一个参数。
那么从数学公式的角度上来说,Momentum 为什么是可以达到加速的效果的呢。请记住一点就好,Momentum 带有了滑动平均,滑动平均会将上下浮动的噪音式特征抹去,也即是我们在上图中看到的摆来摆去的动作幅度,就被滑动平均给抹平啦,但是如果你一直在朝着某一个方向走的话,滑动平均是抹不平的,
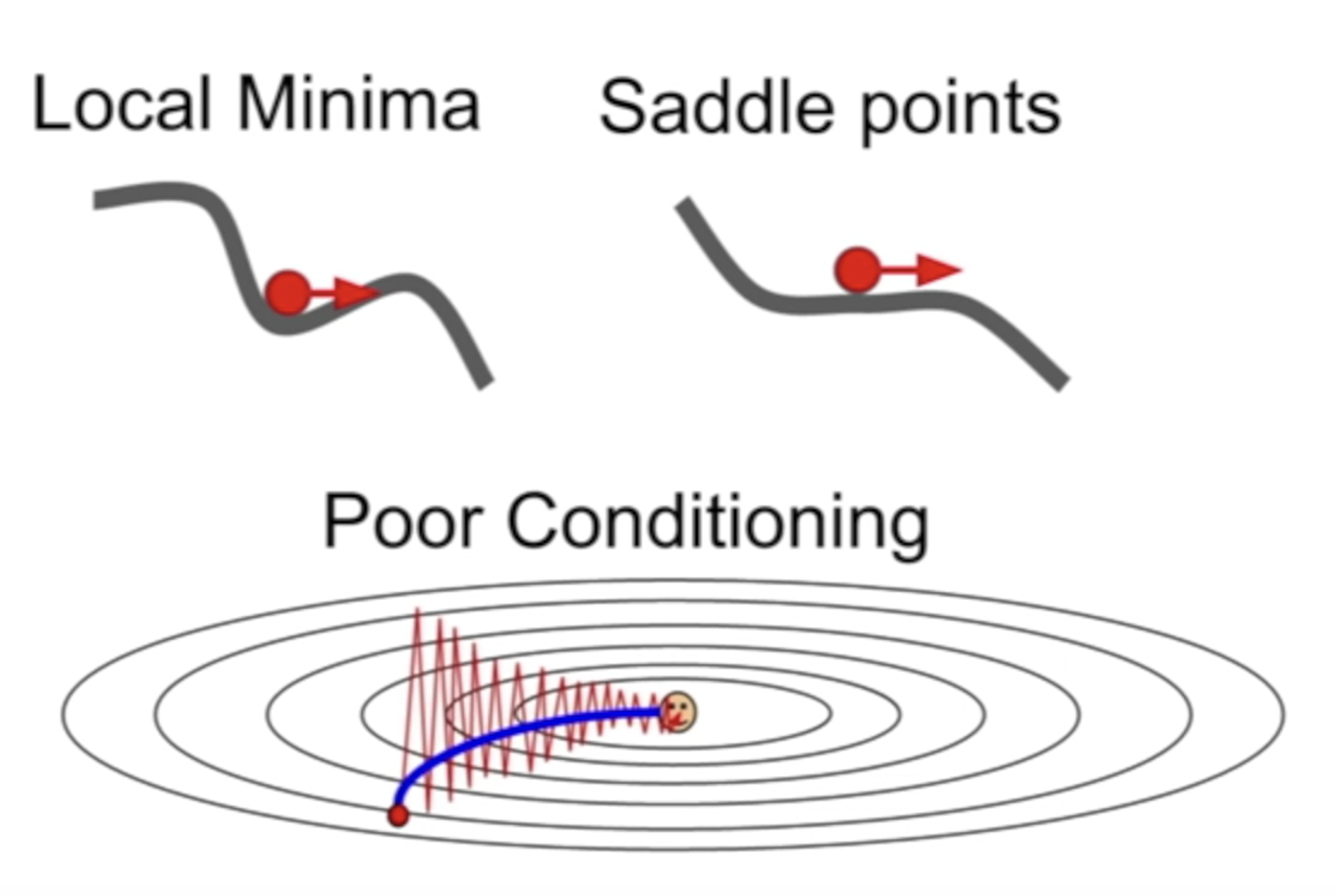
Momentum 还有一个好处,就是可以冲出局部最优解,或者某一些梯度为 0 的地方,这也是因为滑动平均使他带有一定的惯性,能冲出洼地。
Nesterov Accelerated Gradient
Nesterov Momentum 是一个稍有不同的 Momentum 更新版本,最近很流行。在这个 Nesterov 中,我们首先查看当前动量所指向的点,然后计算此时的梯度。如下图所示

Nesterov Momentum 的计算公式可以表示为:

它唯一的区别是 W 变成了 W - Vt,但这里我并不打算细说 Nesterov Momentum 了,我们直接来看一个梯度下降的对比图吧。

可以看出 Nesterov Momentum 比单纯的 Momentum 要少走了许多弯路,更直接的走向洼地。
AdaGrad
AdaGrad 是另外一种非常常见的梯度下降的优化方法,他的主要思想就是,在比较晃荡的下降方向上,给予一定的阻力,让你不要那么的晃,晃得越厉害,就阻力越大,导致你不能晃。具体的做法,我们看一下 AdaGrad 的计算方法来说明吧。

首先,在梯度下降的方向上,我们会有一个变量 grad_squared 存储在该方向上的变化的平方的累积,也就是说,如果在这个方向上,如果波动一直很大的话,这个 += 操作会让这个方向上的 grad_squared 越来越大,相对应的,而如果变化一直很小,这个方向上,不怎么晃的话,grad_squared 也会一直比较小。
注意,这里的看上去是变量的东东,实际上都是 vector 哈,numpy 的乘法和除法,都是对每一个元素进行的,而不是我们传统意义上的向量点乘。
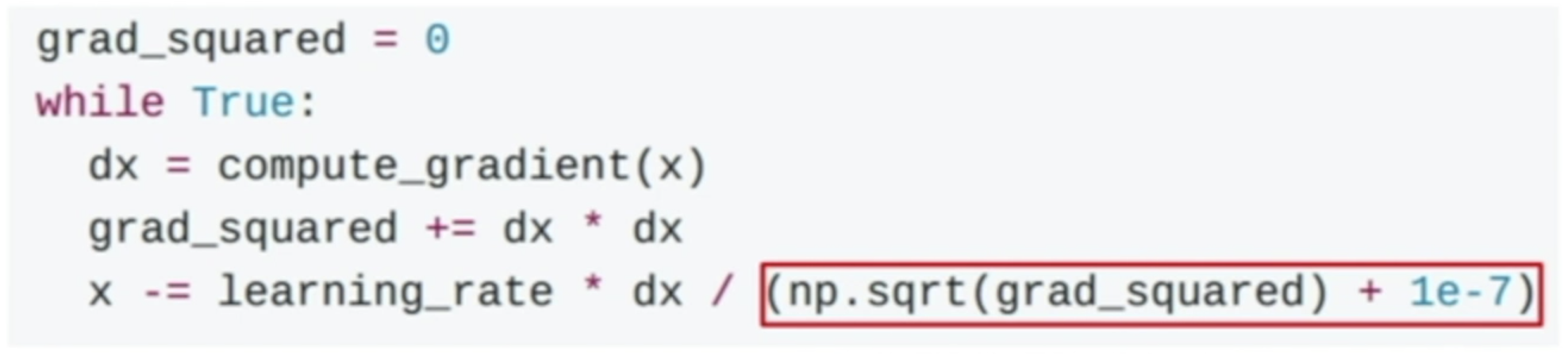
记下来,在计算梯度变化的时候,我们会额外的除以一个因子,这个因子是用来操控梯度下降真实的变化大小的,即是说,按照公式,如果前面的 grad_squared 累积的越大,那么在该方向上,除数就越大,导致在这个方向上,后来就很难移动了,同理,前面的累积越小,在这个方向上,梯度的变化也就越大。
形象的来说,AdaGrad 的作用和 Momentum 类似, 不过 AdaGrad 不是给喝醉酒的人安排另一个下坡, 而是给他一双不好走路的鞋子, 使得他一摇晃着走路就脚疼, 鞋子成为了走弯路的阻力, 逼着他往前直着走。
Problems With AdaGrad ?
细心的同学不难发现,AdaGrad 是很明显的存在着一个问题的:
- grad_squared 是一个一直累积的过程,那么积少成多,哪怕是在一些方向上,它的波动一直很小,但是由于是不停的迭代增加, grad_squared 最终也会变得很大,导致在训练的后期,任意一个方向上,都有着很大的阻力,梯度下降就走不下去了。
RMSProp
RMSProp 基于 AdaGrad,进行了一些小小的改动,也解决了我们上面提出来的,在随着训练时间增长,AdaGrad 的步伐会变得很小的问题。RMSProp 的做法是这样的:
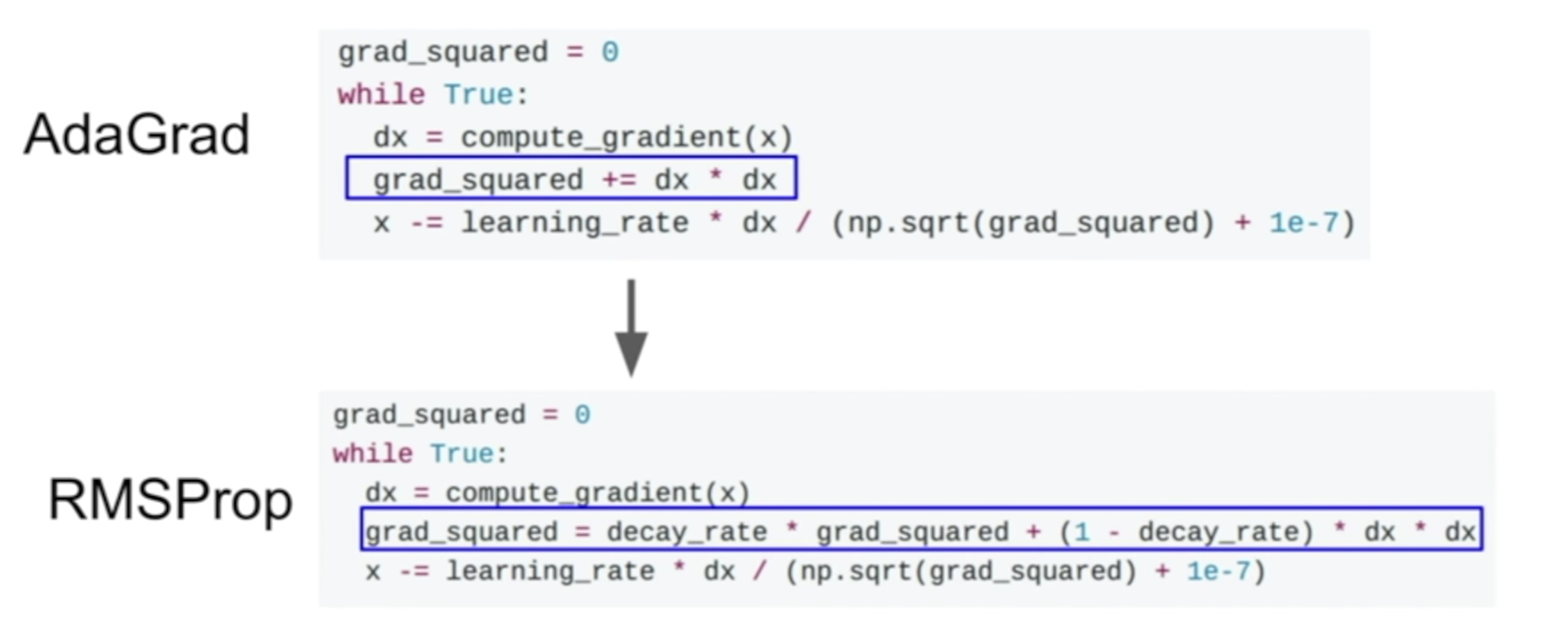
简单对比一下 RMSProp 与 AdaGrad ,会发现 RMSProp 在计算 grad_squared 的时候,加上了一个 decay (衰减率)的东西,这样造成的效果即是,既保留了 AdaGrad 的特性,又不会一直过分增加 grad_squared 导致最后阻力过大。

如果我们对比一下 RMSProp 以及 Momentum 的下降效果,会发现 Momentum 由于带着冲量,走的很快,往往是先走过头了,然后再走回头路,找到最终的最优化的位置,而 RMSProp 则是在走的过程中,不停的在调节着自己,朝着最正确的地方走去。
实际上,前面的梯度下降的优化方法,我们是有两种思路的,一种是 Momentum 派系,他们的思想就是,让下降带冲量,另一种是 AdaGrad 派系,他们的思想则是波动太大,就给你阻力,防止你波动。这两种思想都非常不错,那有没有可能,将两种思想结合到一起呢?答案是有的,那就是 Adam。
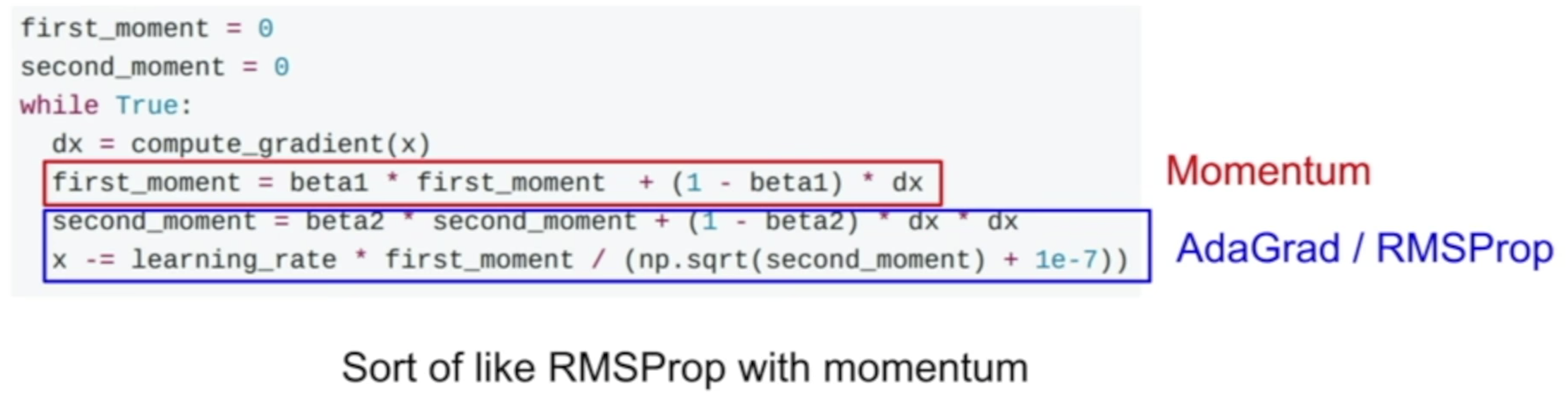
如上图所示,红色部分来自于 Momentum,蓝色部分来自于 RMSProp。那么这种非常 naive 的合并两个算法,会不会有问题呢?
考虑一下在我们梯度下降的第一步的时候,会怎样。看 second_momentum,由于最开始的初始化的时候,second_momentum 是 0,且beta2 的值,我们也一般会设置成 0.99 这样的比较接近 1 的值,就会导致 second_momentum 在第一步的时候,值会非常的小。在最后算梯度更新的时候,如果除以这么一个很小的值,那么第一步的步伐会变得很大。
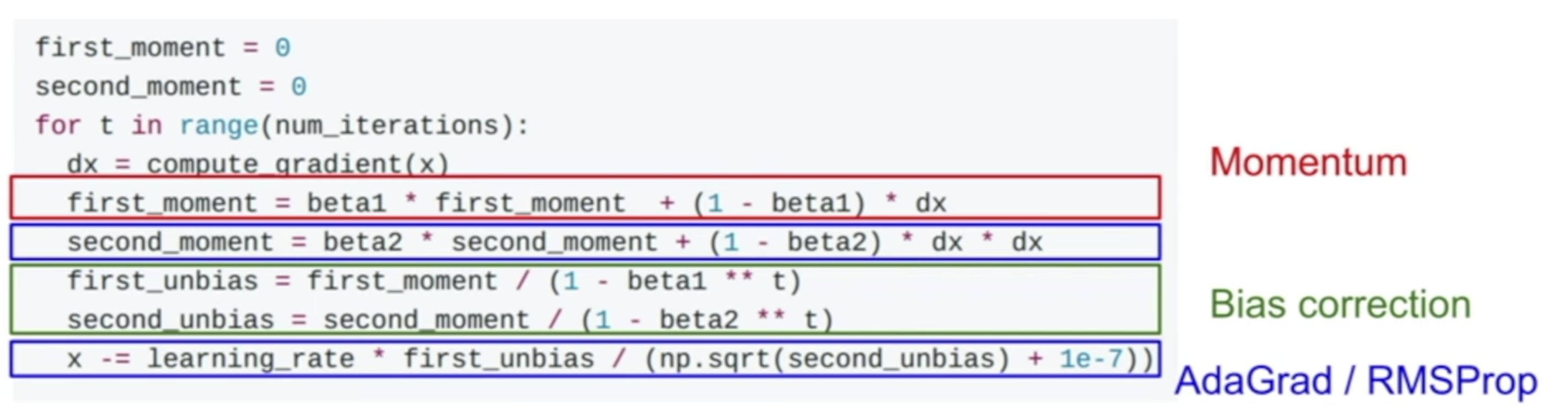
我们知道最开始的步伐太大,不是很好,所以 Adam 在处理的过程中,加入了一定的 bias,这样的话,就可以防止最开始的时候步伐过长了。
通常,我们会选择 0.9 作为 beta1 的值,0.99 作为 beta2 的值,1e-3 或者 5e-4 作为 learning rate。这些参数对于绝大多数的模型都能取到不错的效果。
如果我们这个时候,对比一下 Adam 与其他的梯度下降的算法的话,会发现 Adam 实际上是中和了前两种的,速度比较快,也不容易走偏。
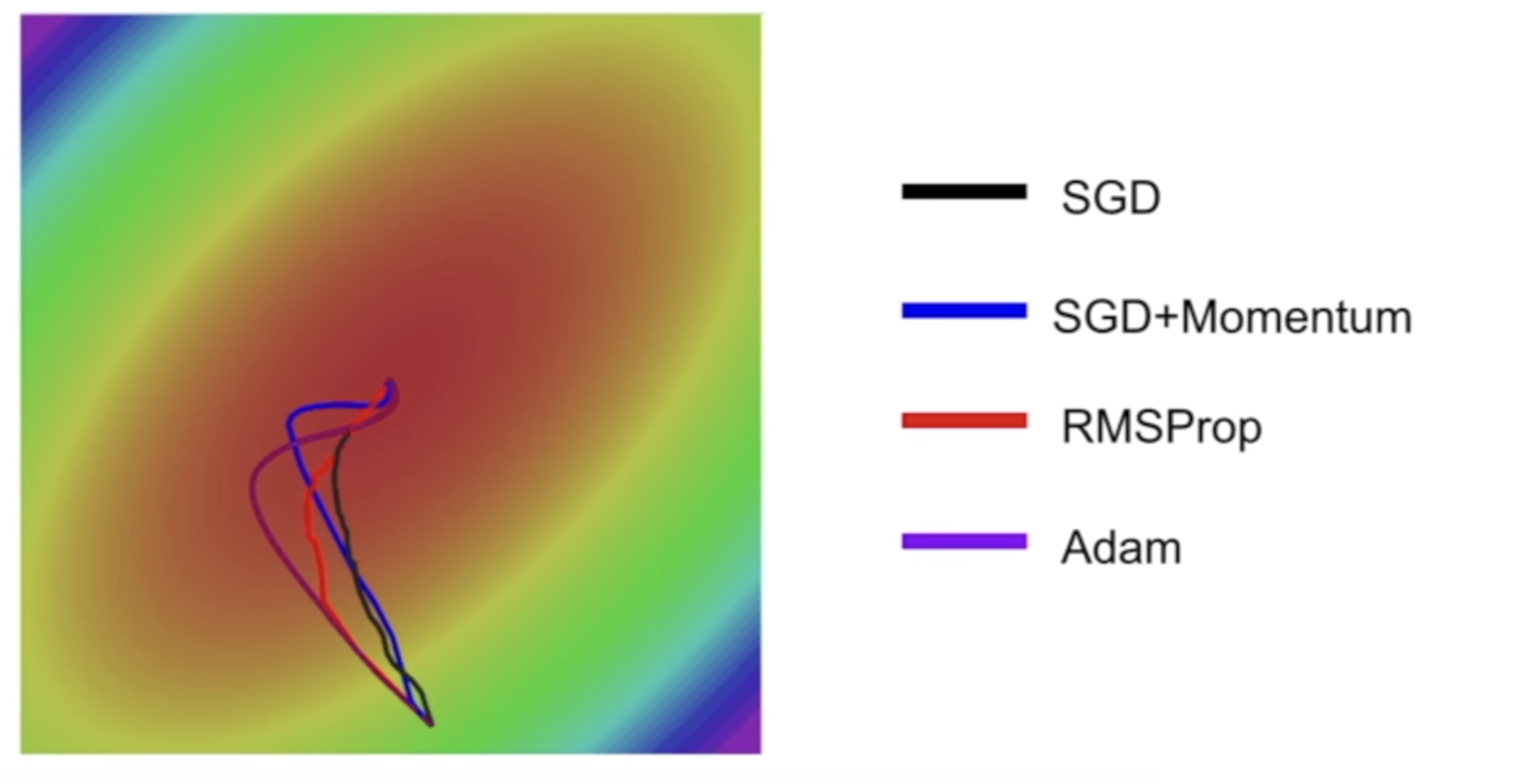
Visualization of Algorithms
下面这个动画(图片来源:Alec Radford)为大多数所提出的优化方法的优化行为提供了一些直觉。在这里也可以看看Karpathy对同样图像的描述,以及所讨论算法的另一个简要概述。
这张图也算比较老的图了,有一些里面涉及的算法我在这篇博客里没有提到,而我提到的 Adam 它也没有画出来,所以将就着看一下吧。
这里可以看到的是 Momentum 系的梯度下降方法,像一头脱缰的野马一样,虽然速度很快,却很容易冲过头了,AdaGrad 系的速度虽然慢一些,但是却一直在不断调整自己,往着正确的方向在走。而 SGD 则像一个勤勤恳恳的老牛,每次都走着正确的方向,却慢的要死。这里补充一下 Adam 的下降速度和方向,大概就是介于 Momentum 和 AdaGrad 系之间。
Which Optimizer to Use ?
最后的最后,我们来简单说一下,我们应该使用哪个优化器吧?如果我们的输入数据很稀少,那么可能会使用自适应学习率方法中的一种,来获得最佳结果。这样的一个好处是,我们不需要调整学习速率,它可能就会达到默认值的最佳结果。
自适应学习率方法中,RMSprop 是 AdaGrad 的延伸,它解决了其学习速度急剧下降的问题,Adam 最后为 RMSprop 增加了偏差修正和动力。就此而言,RMSprop 和 Adam 是非常相似的算法,在相似的情况下,Kingma等人表明,偏差修正有助于 Adam 在优化结束时略微优于 RMSprop ,因为梯度变得更加稀疏。就目前而言,Adam 可能是最好的整体选择。
一个比较有意思的事情是,看似最不好的 SGD 下降方法(因为它花费的时间最长),有时却能达到最好的学习效果。如果想要做到这一点,我们需要三个重要的地方下额外的功夫:
- 1. 一个非常好的初始值的设定。
- 2. 学习速率的 decay
- 3. 类似于模拟退火算法的让梯度下降不要卡在鞍部
当然,如果你不想要这么复杂的话,Adam 应该能满足你的需求了。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK