

工具使用-如何使用ROS在RViz中显示Markers(python版 points and lines 示例)
source link: https://zongweizhou1.github.io/2019/06/26/rviz-points-and-lines/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
工具使用-如何使用ROS在RViz中显示Markers(python版 points and lines 示例)
Introduction
我们先来看看Marker 中定义了那些类型:
rosmsg show visualization_msgs/Marker
uint8 ARROW=0
uint8 CUBE=1
uint8 SPHERE=2
uint8 CYLINDER=3
uint8 LINE_STRIP=4
uint8 LINE_LIST=5
uint8 CUBE_LIST=6
uint8 SPHERE_LIST=7
uint8 POINTS=8% 上面声明了9种类型
uint8 TEXT_VIEW_FACING=9
uint8 MESH_RESOURCE=10
uint8 TRIANGLE_LIST=11
uint8 ADD=0
uint8 MODIFY=0
uint8 DELETE=2
uint8 DELETEALL=3
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string ns
int32 id
int32 type
int32 action
geometry_msgs/Pose pose # pose包含的属性
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
geometry_msgs/Vector3 scale
float64 x
float64 y
float64 z
std_msgs/ColorRGBA color
float32 r
float32 g
float32 b
float32 a
duration lifetime
bool frame_locked
geometry_msgs/Point[] points # 对应一个list
float64 x
float64 y
float64 z
std_msgs/ColorRGBA[] colors
float32 r
float32 g
float32 b
float32 a
string text
string mesh_resource
bool mesh_use_embedded_materials
当type=POINTS时, points中的每一个点对应改为之上画一个点, type=LINE_STRIP时,表示poinits中任意两个相邻的点存在连线, type=LINE_LIST中的points内点不会将线连在一起,于是相邻点连线,但不存在共享定点的连线,比如第0个点和第1个点连线,第2个点和第3个点连线。
Publisher Node
roscd using_markers/scripts
vim points_and_lines.py
points_and_lines.py的内容:
#!/usr/bin/env python
import rospy
import numpy as np
from visualization_msgs.msg import Marker
from geometry_msgs.msg import Point
def main():
rospy.init_node("points_and_lines", anonymous=True)
pub = rospy.Publisher("visualization_marker", Marker, queue_size=10)
rate = rospy.Rate(30)
f = 0.0
while not rospy.is_shutdown():
types = [Marker.POINTS, Marker.LINE_STRIP, Marker.LINE_LIST]
markers = [Marker() for _ in ['points', 'line_strip', 'line_list']]
for i, m in enumerate(markers): # 分别处理不同的marker
m.header.frame_id = '/my_frame'
m.header.stamp = rospy.Time.now()
m.ns = 'points_and_lines'
m.pose.orientation.w = 1.0
m.action = Marker.ADD
m.id = i
m.type = types[i]
m.color.a = 1.0
if i == 0: # point
m.scale.x = 0.2
m.scale.y = 0.2
m.color.g = 1.0
elif i == 1: # line_strip
m.scale.x = 0.1
m.color.b = 1.0
elif i == 2:
m.scale.x = 0.1
m.color.r = 1.0
for i in range(100): # 给每一个marker添加points
y = 5 * np.sin(f + i/100.0 * 2 * np.pi)
z = 5 * np.cos(f + i/100.0 * 2 * np.pi)
p = Point(i-50, y, z)
markers[0].points.append(p)
markers[1].points.append(p)
markers[2].points.extend([p, Point(i-50, y, z+1)])
for m in markers:
pub.publish(m)
rate.sleep()
f += 0.04
if __name__=='__main__':
main()
好像相对于上篇文章内容并没有添加新的东西。主要就是不同类型中points列表的设置。
Building and Viewing
# ~/catkin_ws
catkin_make
. devel/setup.bash
两个终端:
rosrun using_markers points_and_lines.py
rosrun rviz rviz
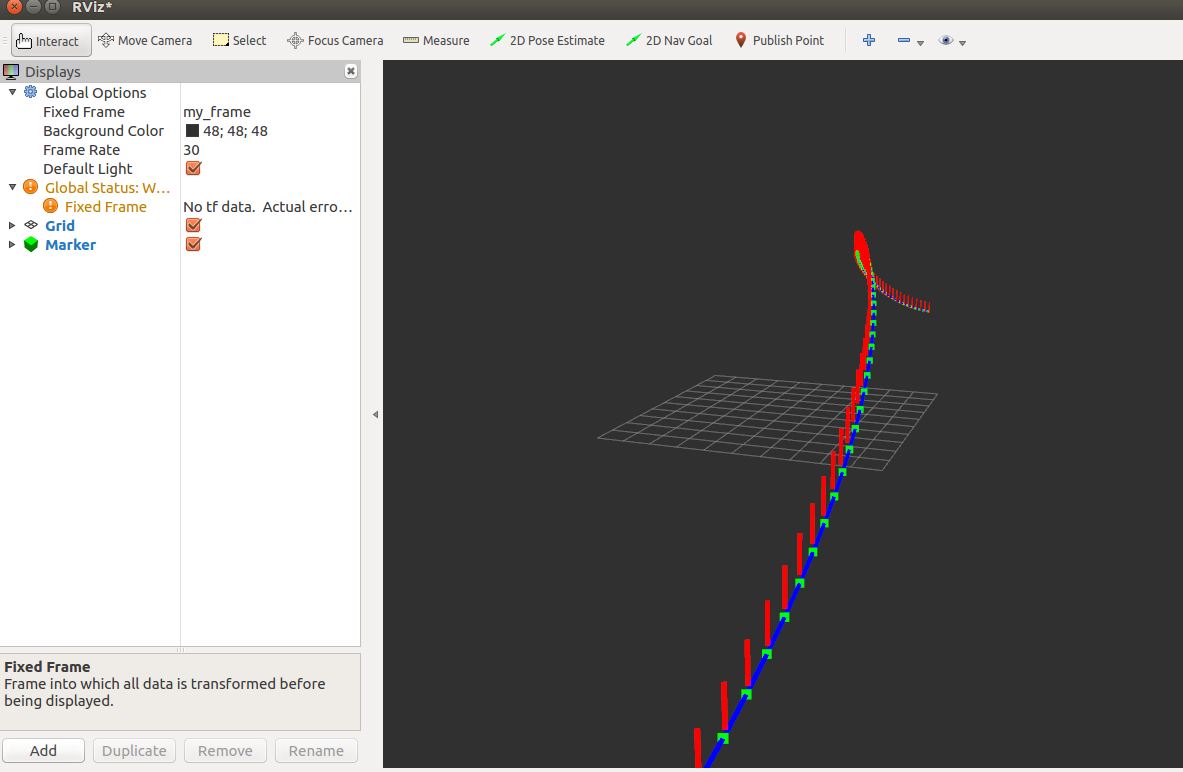
然后在rviz的左边栏将Fixed Frame 值改为 /my_frame
左下角添加Add msg的类型Marker, 然后就能看到结果了。
知识 & 情怀 | 赏或者不赏,我都在这,不声不响
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK