
2

POJ 3083 - Children of the Candy Corn
source link: https://exp-blog.com/algorithm/poj/poj3083-children-of-the-candy-corn/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

Children of the Candy Corn
- POJ 3083 - Children of the Candy Corn
- Time: 1000MS
- Memory: 65536K
- 难度: 初级
- 分类: DFS
给定一个迷宫,S是起点,E是终点,# 是墙不可走,. 可以走
先输出左转优先时,从S到E的步数
再输出右转优先时,从S到E的步数
最后输出S到E的最短步数
W为宽,列数
H为高,行数
DFS和BFS的综合题水题,难度不大,但是写代码时要注意几方面:
1、 左转、右转优先搜索时必须标记当前位置时的方向,我定义的方向是
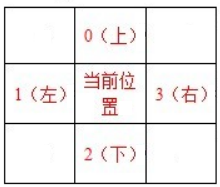
最初的方向由起点S确定,而下一步的方向则由前一步的走向决定。
例如 左边优先搜索:
当前位置的方向指向 1(向左),(这同时说明前一步是在第“3”的位置走过来的)
那么走下一步时,就要根据2103的顺序,先逐格确定当前位置周边的四格是否可行
若第一次确认2可行,就走到2,在位置2时的方向为2(向下)
若2不可行,则再确定1,若1可行,就走到1,在位置1时的方向为1(向左)
若1也不可行,则再确定0,若0可行,就走到0,在位置0时的方向为0(向上)
若0也不可行,说明进入了迷宫的死胡同,要从原路返回,走回3
右边优先搜索也同理。
根据我定义的方向,设当前位置为d,那么:
- 左转,用数学式子表达就是
d=(d+1)%4 - 右转,用数学式子表达就是
d=(d+3)%4
我比较懒,在我的程序中,DFS和BFS都用了多入口的做法,有兴趣的同学可以利用我给出的这两个式子对代码进行优化。
这里还有一点必须要注意的: 左边、右边优先搜索都不是找最短路,因此走过的路可以再走,无需标记走过的格
2、寻找最短路只能用BFS
因此在做第3问时别傻乎乎的又用DFS,DFS对于样例的输入确实和BFS得到的结果一样的,别以为样例PASS就提交了。。。所以我就说样例没代表性,学会测试数据很重要= =
需要注意的还有:
- 要求E的最短路,必须把迷宫模拟为树,S为根,找到E所在的层(树深),该层就是S到E的最短路,处理技巧就是在BFS时,令
queue[tail]的depth等于对应的queue[head]的depth+1,详细见我的程序 - 把循环的次数作为深度就铁定错的
//Memory Time
// 212K 0MS
#include<iostream>
using namespace std;
typedef class
{
public:
int r,c;
int depth;
}SE;
SE s,e; //起止点
int Lstep; //左边优先搜索 时从S到E的总步数
int Rstep; //右边优先搜索 时从S到E的总步数
int shortstep; //S到E的最少总步数
bool maze[41][41]; //记录迷宫的“可行域”与“墙”
void DFS_LF(int i,int j,int d) //左边优先搜索,i,j为当前点坐标,d为当前位置方向
{
Lstep++;
if(i==e.r && j==e.c)
return;
switch(d)
{
case 0:
{
if(maze[i][j-1])
DFS_LF(i,j-1,1);
else if(maze[i-1][j])
DFS_LF(i-1,j,0);
else if(maze[i][j+1])
DFS_LF(i,j+1,3);
else if(maze[i+1][j])
DFS_LF(i+1,j,2);
break;
}
case 1:
{
if(maze[i+1][j])
DFS_LF(i+1,j,2);
else if(maze[i][j-1])
DFS_LF(i,j-1,1);
else if(maze[i-1][j])
DFS_LF(i-1,j,0);
else if(maze[i][j+1])
DFS_LF(i,j+1,3);
break;
}
case 2:
{
if(maze[i][j+1])
DFS_LF(i,j+1,3);
else if(maze[i+1][j])
DFS_LF(i+1,j,2);
else if(maze[i][j-1])
DFS_LF(i,j-1,1);
else if(maze[i-1][j])
DFS_LF(i-1,j,0);
break;
}
case 3:
{
if(maze[i-1][j])
DFS_LF(i-1,j,0);
else if(maze[i][j+1])
DFS_LF(i,j+1,3);
else if(maze[i+1][j])
DFS_LF(i+1,j,2);
else if(maze[i][j-1])
DFS_LF(i,j-1,1);
break;
}
}
return;
}
void DFS_RF(int i,int j,int d) //右边优先搜索,i,j为当前点坐标,d为当前位置方向
{
Rstep++;
if(i==e.r && j==e.c)
return;
switch(d)
{
case 0:
{
if(maze[i][j+1])
DFS_RF(i,j+1,3);
else if(maze[i-1][j])
DFS_RF(i-1,j,0);
else if(maze[i][j-1])
DFS_RF(i,j-1,1);
else if(maze[i+1][j])
DFS_RF(i+1,j,2);
break;
}
case 1:
{
if(maze[i-1][j])
DFS_RF(i-1,j,0);
else if(maze[i][j-1])
DFS_RF(i,j-1,1);
else if(maze[i+1][j])
DFS_RF(i+1,j,2);
else if(maze[i][j+1])
DFS_RF(i,j+1,3);
break;
}
case 2:
{
if(maze[i][j-1])
DFS_RF(i,j-1,1);
else if(maze[i+1][j])
DFS_RF(i+1,j,2);
else if(maze[i][j+1])
DFS_RF(i,j+1,3);
else if(maze[i-1][j])
DFS_RF(i-1,j,0);
break;
}
case 3:
{
if(maze[i+1][j])
DFS_RF(i+1,j,2);
else if(maze[i][j+1])
DFS_RF(i,j+1,3);
else if(maze[i-1][j])
DFS_RF(i-1,j,0);
else if(maze[i][j-1])
DFS_RF(i,j-1,1);
break;
}
}
return;
}
void BFS_MSS(int i,int j) //最短路搜索
{
bool vist[41][41]={false};
SE queue[1600];
int head,tail;
queue[head=0].r=i;
queue[tail=0].c=j;
queue[tail++].depth=1; //当前树深标记,这是寻找最短路的关键点
vist[i][j]=true;
while(head<tail)
{
SE x=queue[head++];
if(x.r==e.r && x.c==e.c)
{
cout<<x.depth<<endl;
return;
}
if(maze[x.r][x.c-1] && !vist[x.r][x.c-1])
{
vist[x.r][x.c-1]=true;
queue[tail].r=x.r;
queue[tail].c=x.c-1;
queue[tail++].depth=x.depth+1;
}
if(maze[x.r-1][x.c] && !vist[x.r-1][x.c])
{
vist[x.r-1][x.c]=true;
queue[tail].r=x.r-1;
queue[tail].c=x.c;
queue[tail++].depth=x.depth+1;
}
if(maze[x.r][x.c+1] && !vist[x.r][x.c+1])
{
vist[x.r][x.c+1]=true;
queue[tail].r=x.r;
queue[tail].c=x.c+1;
queue[tail++].depth=x.depth+1;
}
if(maze[x.r+1][x.c] && !vist[x.r+1][x.c])
{
vist[x.r+1][x.c]=true;
queue[tail].r=x.r+1;
queue[tail].c=x.c;
queue[tail++].depth=x.depth+1;
}
}
return;
}
int main(int i,int j)
{
int test;
cin>>test;
while(test--)
{
int direction; //起点S的初始方向
int w,h; //size of maze
cin>>w>>h;
/*Initial*/
Lstep=1;
Rstep=1;
memset(maze,false,sizeof(maze));
/*Structure the Maze*/
for(i=1;i<=h;i++)
for(j=1;j<=w;j++)
{
char temp;
cin>>temp;
if(temp=='.')
maze[i][j]=true;
if(temp=='S')
{
maze[i][j]=true;
s.r=i;
s.c=j;
if(i==h)
direction=0;
else if(j==w)
direction=1;
else if(i==1)
direction=2;
else if(j==1)
direction=3;
}
if(temp=='E')
{
maze[i][j]=true;
e.r=i;
e.c=j;
}
}
/*Left First Search*/
switch(direction)
{
case 0: {DFS_LF(s.r-1,s.c,0); break;}
case 1: {DFS_LF(s.r,s.c-1,1); break;}
case 2: {DFS_LF(s.r+1,s.c,2); break;}
case 3: {DFS_LF(s.r,s.c+1,3); break;}
}
cout<<Lstep<<' ';
/*Right First Search*/
switch(direction)
{
case 0: {DFS_RF(s.r-1,s.c,0); break;}
case 1: {DFS_RF(s.r,s.c-1,1); break;}
case 2: {DFS_RF(s.r+1,s.c,2); break;}
case 3: {DFS_RF(s.r,s.c+1,3); break;}
}
cout<<Rstep<<' ';
/*Most Short Step Search*/
BFS_MSS(s.r,s.c);
}
return 0;
}Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK