

【Complex Analysis3】共形映射
source link: https://www.guofei.site/2019/07/14/complexanalysis3.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

【Complex Analysis3】共形映射
2019年07月14日Author: Guofei
文章归类: 5-3-复分析与积分变换 ,文章编号: 92503
版权声明:本文作者是郭飞。转载随意,但需要标明原文链接,并通知本人
原文链接:https://www.guofei.site/2019/07/14/complexanalysis3.html
基本定义
w=f(z)把曲线C映射到曲线Γ,z0∈C,w0∈Γ,w0=f(z0)
把邻域映射到邻域z=z0+∣Δz∣eiθ,w=w0+∣Δw∣eiϕ
如果limz→z0∣w−w0∣∣z−z0∣存在,那么这个极限值叫做曲线C经函数w=f(z)映射后在z0处的 伸缩率
如果limz→z0(ϕ−θ)存在,那么这个极限值叫做曲线C经函数w=f(z)映射后在z0处的 旋转角
(保角性(conformal) 也可以这么理解:任意过z0的两条曲线有一个夹角,曲线经过f映射后的两条曲线也有一个夹角。对于任意两条曲线,f映射前后的这两个夹角都相等。)
(TH:if f is analytic and f′(z0)≠0 then f is conformal at z0)
如果w=f(z)在D内解析,那么f′(z0)=limΔz→0ΔwΔz=limΔz→0∣Δw∣∣Δz∣ei(ϕ−θ)
limΔz→0∣Δw∣∣Δz∣=∣f′(z0)∣,也就是说,对于任何过z0的曲线C,伸缩率都不变,这种性质叫做 伸缩率不变性
limΔz→0(ϕ−θ)=argf′(z0),也就是说,对于任何过z0的曲线C,旋转角都不变,这种性质叫做 旋转角不变性
(f′(z0)≠0是必要的,否则保角性将不成立)
共形映射
对于D内的映射w=f(z),如果它在任一点都具有 伸缩率不变性 和 旋转角不变性 称w=f(z)是 第一类保角映射
如果伸缩率不变,保持角度不变但方向相反,称为 第二类保角映射
(根据上一部分的分析,如果w=f(z)在D内解析,那么一定在D内是保角映射)
共形映射 w=f(z)是区域D内的 第一类保角映射,并且当z1≠z2,有f(z1)≠f(z2)
Möbius transformations
Möbius transformations(分式线性映射)定义为这样的映射: w=az+bcz+d,(ad−bc≠0)
性质(定义ˆC=C∪{∞}):
- 在ˆC上是一一映射
- 是ˆC→ˆC的包角映射,也是唯一的满足ˆC→ˆC的包角映射
(保角性很好证明,解析、非0 必保角) - 保圆性,也就是把圆映射到圆(把直线看成无限大的圆)
- Given three distinct points z1,z2,z3∈ˆC, there exists a unique Möbius transformation f such that f(z1)=0,f(z2)=1,f(z3)=∞.
分式线性映射可以分解成以下4种简单函数
- w=z+b(b是复数),是平移映射(translation)
- w=zeiθ,(θ∈R),是旋转映射(rotation)
- w=rz,(r>0,r∈R),是相似映射(把曲线放大)(dilation)
- w=1z,是反演映射,(可以理解关于单位圆做一个对称)(inversion)
(为了形象理解反演映射,写了个动画程序,可以自行运行试试看)
# 复变函数1/z的可视化动画
import numpy as np
import matplotlib.pyplot as plt
fig = plt.figure(figsize=(5, 5))
ax = fig.subplots(1, 1)
line1, line2 = ax.plot(0, 0, 'bo'), ax.plot(0, 0, 'ro')
circle = np.exp(1j * 2 * np.pi * np.linspace(0, 1, 100))
line3 = ax.plot(circle.real, circle.imag)
ax.set_xlim(-1, 5)
ax.set_ylim(-1, 5)
plt.ion() # 第一个重要的点
p = plt.show() # 第二个重要的点
for r in np.linspace(0.2,5,200):
z = r * np.exp(np.linspace(0, 1, 10) * 2 * np.pi * 1j)
w = 1 / z
plt.setp(line1, 'xdata', z.real, 'ydata', z.imag) # 第三个重要的点
plt.setp(line2, 'xdata', w.real, 'ydata', w.imag) # 第三个重要的点
plt.pause(0.1) # 第四个重要的点TH1 分式线性映射是共形映射
Möbius transformations 的保圆性
TH2 Möbius transformations 有保圆性。
所谓保圆性,是把圆映射到圆。(可以把直线也看成是无穷大的圆)
证明:(假设∣z−O∣=r,w=f(z))
- 对于前三种映射,可以这样证明保角性 w=az+b⟹z=(w−b)/a⟹∣(w−b)/a−O∣=r
- 对于inversion,用同样的方法可以证明保圆性
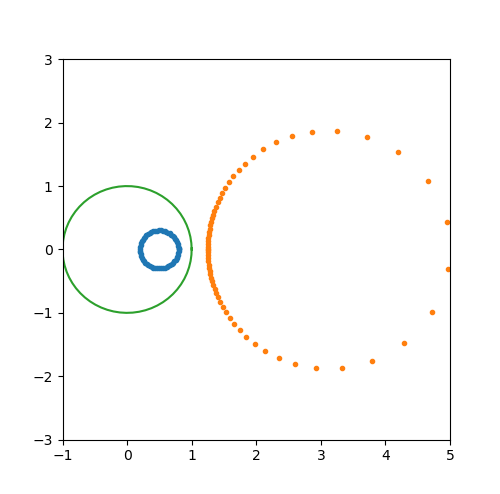
直观理解如下:
# 保圆性的可视化
import numpy as np
import matplotlib.pyplot as plt
fig = plt.figure(figsize=(5, 5))
ax = fig.subplots(1, 1)
unit_circle = np.exp(1j * np.linspace(0, 2 * np.pi, 30))
z = 1 + 1j + unit_circle * 0.5
w = 1 / z
line1 = ax.plot(z.real, z.imag, '.r')
line2 = ax.plot(w.real, w.imag, '.b')
line3 = ax.plot(unit_circle.real, unit_circle.imag)
plt.show()
Möbius transformations 的性质3
TH3 Given three distinct points z1,z2,z3∈ˆC, there exists a unique Möbius transformation f such that f(z1)=0,f(z2)=1,f(z3)=∞.
In fact,
f(z)=z−z1z−z3z2−z3z2−z1
其它性质
- TH4 The composition of two Möbius transformations is a Möbius transformation, and so is the inverse.
- TH5 Given three distinct points z1,z2,z3 and three distinct points w1,w2,w3, there exists a unique Möbius transformation f:ˆC→ˆC that maps zj to wj, j = 1, 2, 3. (用TH3和TH4可证明)
The Riemann Mapping Theorem
If D is a simply connected domain (= open, connected, no holes) in the complex plane, but not the entire complex plane, then there is a conformal map ( = analytic, one-to-one, onto) of D onto the open unit disk D.
参考资料
coursera:Introduction to Complex Analysis
李红:《复变函数与积分变换》高等教育出版社
“十五”国家规划教材《复变函数与积分变换》高等教育出版社
钟玉泉:《复变函数论》高等教育出版社
您的支持将鼓励我继续创作!
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK