

DriveGPT4:自动驾驶或将迎来GPT时刻?结合LLM的端到端系统来了!
source link: https://www.51cto.com/article/769713.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

DriveGPT4:自动驾驶或将迎来GPT时刻?结合LLM的端到端系统来了!
本文经自动驾驶之心公众号授权转载,转载请联系出处。
笔者的个人理解
在过去的十年里,自动驾驶在学术界和工业界都得到了快速发展。然而其有限的可解释性仍然是一个悬而未决的重大问题,严重阻碍了自动驾驶的发展进程。以前使用小语言模型的方法由于缺乏灵活性、泛化能力和鲁棒性而未能解决这个问题。近两年随着ChatGPT的出现,多模态大型语言模型(LLM)因其通过文本处理和推理非文本数据(如图像和视频)的能力而受到研究界的极大关注。因此一些工作开始尝试将自动驾驶和大语言模型结合起来,今天汽车人为大家分享的DriveGPT4就是利用LLM的可解释实现的端到端自动驾驶系统。DriveGPT4能够解释车辆动作并提供相应的推理,以及回答用户提出的各种问题以增强交互。此外,DriveGPT4以端到端的方式预测车辆的运动控制。这些功能源于专门为无人驾驶设计的定制视觉指令调整数据集。DriveGPT4也是世界首个专注于可解释的端到端自动驾驶的工作。当与传统方法和视频理解LLM一起在多个任务上进行评估时,DriveGPT4表现出SOTA的定性和定量性能。
项目主页:https://tonyxuqaq.github.io/projects/DriveGPT4/
总结来说,DriveGPT4的主要贡献如下:
- 为可解释的自动驾驶开发了一个新的视觉指令调整数据集。
- 提出了一个全新的多模态LLM—DriveGPT4。DriveGPT4对创建的数据集进行了微调,可以处理多模态输入数据,并提供文本输出和预测的控制信号。
- 在多个任务上评估所有方法,DriveGPT4的性能优于所有基线。此外,DriveGPT4可以通过零样本泛化处理看不见的场景。
通过ChatGPT生成指令数据
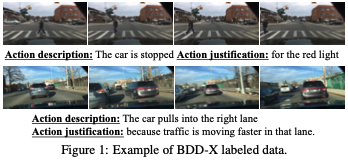
具体来说,DriveGPT4训练使用的视频和标签是从BDD-X数据集中收集的,该数据集包含约20000个样本,包括16803个用于训练的clip和2123个用于测试的clip。每个clip采样8个图像。此外,它还提供每帧的控制信号数据(例如,车辆速度和车辆转弯角度)。BDD-X为每个视频clip提供了关于车辆行动描述和行动理由的文本注释,如图1所示。在以前的工作中,ADAPT训练caption网络来预测描述和理由。但是,提供的描述和标签是固定的和刚性的。如果人类用户希望了解更多关于车辆的信息并询问日常问题,那么过去的工作可能会功亏一篑。因此,仅BDD-X不足以满足可解释自动驾驶的要求。
由ChatGPT/GPT4生成的指令调整数据已被证明在自然语言处理、图像理解和视频理解中对性能增强是有效的。ChatGPT/GPT4可以访问更高级别的信息(例如,图像标记的captions、GT目标边界框),并可以用于提示生成对话、描述和推理。目前,还没有为自动驾驶目的定制的视觉指令跟随数据集。因此,我们在ChatGPT的辅助下,基于BDD-X创建了自己的数据集。
修正问题回答。由于BDD-X为每个视频clip提供了车辆动作描述、动作理由和控制信号序列标签,因此我们直接使用ChatGPT基于这些标签生成一组三轮问答(QA)。首先,我们创建三个问题集:Qa、Qj和Qc。
- Qa包含相当于“这辆车目前的行动是什么?”的问题。
- Qj包含相当于“为什么车辆会有这种行为?”的问题。
- Qc包含相当于“预测下一帧中车辆的速度和转弯角度”的问题。
LLM可以同时学习预测和解释车辆动作。但是如前所述,这些QA具有固定和严格的格式。由于缺乏多样性,仅对这些QA进行训练会降低LLM的推理能力,使其无法回答其他形式的问题。
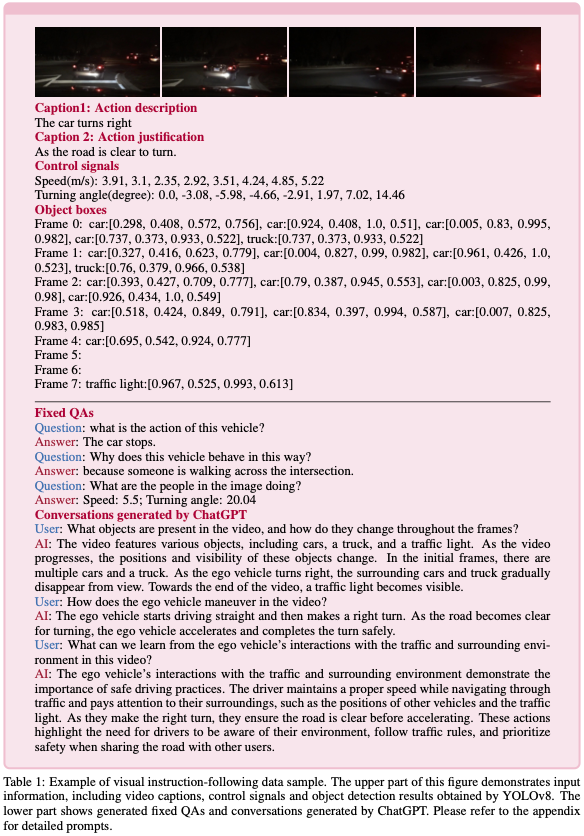
ChatGPT生成的对话。为了解决上述问题,ChatGPT作为一名教师以生成更多关于自车的对话。提示通常遵循LLaVA中使用的提示设计。为了使ChatGPT能够“看到”视频,YOLOv8用于检测视频每帧中常见的目标(例如,车辆、行人)。所获得的目标框作为更高级别的信息馈送到ChatGPT。除了目标检测结果外,ChatGPT还可以访问视频clip的真实控制信号序列和captions。基于这些特权信息,ChatGPT会被提示生成关于自车、红绿灯、转弯方向、变道、周围物体、物体之间的空间关系等的多轮和类型的对话。详细提示见附录。
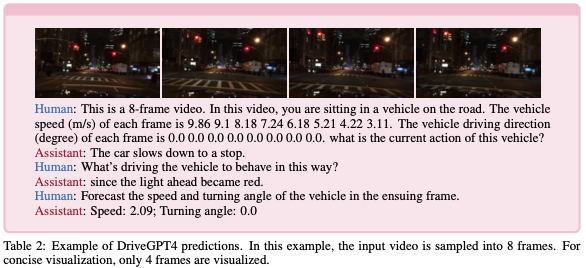
最后,我们收集了28K的视频文本指令如下样本,包括由ChatGPT生成的16K固定QA和12K对话。生成的示例如表1所示。
DriveGPT4
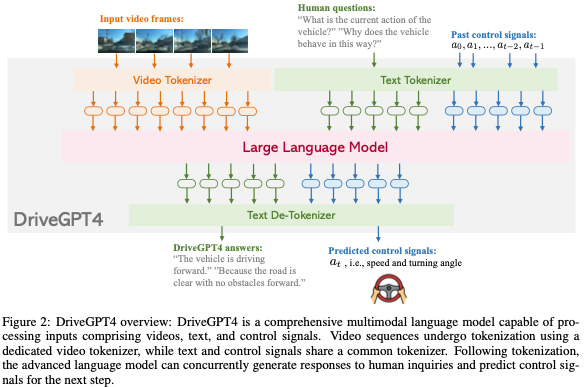
DriveGPT4是一个多功能多模态的LLM,能够处理各种输入类型,包括视频、文本和控制信号。视频被均匀地采样到固定数量的图像中,并使用基于Valley的视频标记器将视频帧转换为文本域标记。从RT-2中汲取灵感,文本和控制信号使用相同的文本标记器,这意味着控制信号可以被解释为一种语言,并被LLM有效地理解和处理。所有生成的令牌都被连接起来并输入到LLM中。本文采用LLaMA 2作为LLM。在生成预测的令牌后,de-tokenizer对其进行解码以恢复人类语言。解码文本包含固定格式的预测信号。DriveGPT4的整体架构如图2所示。
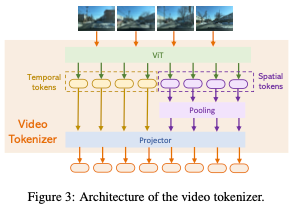
视频标记器。视频标记器基于Valley。对于每个视频帧,使用预训练的CLIP视觉编码器来提取其特征。的第一个通道表示的全局特征,而其他256个通道响应的patch特征。为了简洁地表示,的全局特征被称为,而的局部patch特征被表示为。然后,整个视频的时间视觉特征可以表示为:

同时,整个视频的空间视觉特征由下式给出:

最终,使用projector将视频的时间特征T和空间特征S都投影到文本域中。tokenizer的详细结构如图3所示。
文本和控制信号。受RT-2的启发,控制信号的处理类似于文本,因为它们属于同一域空间。控制信号直接嵌入文本中进行提示,并使用默认的LLaMA标记器。在本研究中,ego车辆的速度v和转向角∆被视为目标控制信号。转向角度表示当前帧和初始帧之间的相对角度。在获得预测的令牌后,LLaMA的tokenizer用于将令牌解码回文本。DriveGPT4预测后续步骤的控制信号,即(vN+1,∆N+1)。预测的控制信号使用固定格式嵌入输出文本中,通过简单的后处理可以轻松提取。表2中给出了DriveGPT4的输入和输出示例。
与以往LLM相关研究一致,DriveGPT4的训练包括两个阶段:(1)预训练阶段,重点是视频文本对齐;以及(2)微调阶段,旨在训练LLM回答与端到端自动驾驶相关的问题。
预训练。与LLaVA和Valley一致,该模型对来自CC3M数据集的593K个图像-文本对和来自WebVid-10M数据集的100K个视频-文本对进行了预训练。预训练图像和视频包含各种主题,并不是专门为自动驾驶应用设计的。在此阶段,CLIP编码器和LLM权重保持固定。只有视频标记器被训练为将视频与文本对齐。
微调。在这个阶段,DriveGPT4中的LLM与可解释的端到端自动驾驶的视觉标记器一起进行训练。为了使DriveGPT4能够理解和处理主要知识,它使用前文中生成的28K视频文本指令进行训练。为了保持DriveGPT4回答日常问题的能力,还使用了LLaVA生成的80K指令跟踪数据。因此,在微调阶段,DriveGPT4使用28K视频文本指令跟随数据以及80K图像文本指令跟随的数据进行训练。前者确保了DriveGPT4可以应用于可互操作的端到端自动驾驶,而后者增强了数据灵活性,有助于保持DriveGPT4的通用问答能力。
可解释的自动驾驶
在本节评估了DriveGPT4及其解释生成的基线,包括车辆行动描述、行动理由和有关车辆状态的其他问题。ADAPT是最先进的基线工作。最近的多模式视频理解LLM也被考虑进行比较。ADAPT采用32帧视频作为输入,而其他方法则采用8帧视频作为输出。
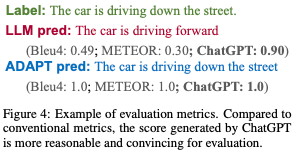
评估指标。为了详细评估这些方法,本文报告了NLP社区中广泛使用的多个指标得分,包括BLEU4、METEOR和CIDEr。然而,这些指标主要衡量单词级别的性能,而没有考虑语义,这可能会导致意想不到的评估结果。鉴于ChatGPT强大的推理能力,它被用来衡量预测质量,并提供更合理的分数。ChatGPT会被提示分配一个介于0和1之间的数字分数,分数越高表示预测精度越高。基于ChatGPT的评估的详细提示见附录。度量比较示例如图4所示。与传统指标相比,Chat-GPT生成的分数为评估提供了更合理、更令人信服的依据。
行动描述和理由。考虑到评估的成本和效率,DriveGPT4在来自BDD-X测试集的500个随机采样的视频clip上进行了测试。目标是尽可能根据给定标签预测车辆行动描述和理由。评估结果显示在表3中。结果表明,与之前最先进的(SOTA)方法ADAPT相比,DriveGPT4实现了卓越的性能,尽管ADAPT使用32帧视频,而DriveGPT4只有8帧视频作为输入。
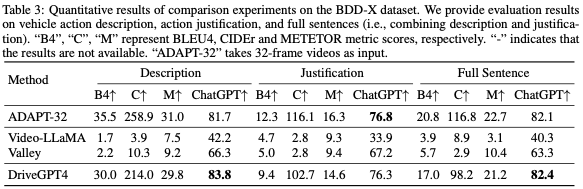
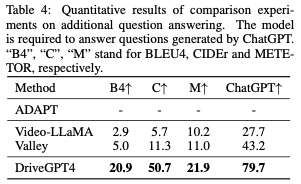
附加问答。上述车辆行动描述和理由具有相对固定的格式。为了进一步评估DriveGPT的可解释能力和灵活性,在第3节中生成了其他问题。BDD-X测试集中的100个随机采样的视频片段用于生成问题。与行动描述和理由相比,这些问题更加多样化和灵活。评价结果如表4所示。ADAPT无法回答除车辆操作说明和理由之外的其他问题。之前的视频了解LLM可以回答这些问题,但他们没有学习到驾驶领域的知识。与所有基线相比,DriveGPT4呈现出优异的结果,展示了其灵活性。
端到端控制
在本节评估了DriveGPT4及其开环控制信号预测的基线,特别关注速度和转向角。所有方法都需要基于顺序输入来预测下一单个帧的控制信号。
评估指标。继之前关于控制信号预测的工作之后,我们使用均方根误差(RMSE)和阈值精度(Aτ)进行评估。τ测量预测误差低于τ的测试样本的比例。为了进行全面比较,我们将τ设置为多个值:{0.1,0.5,1.0,5.0}。
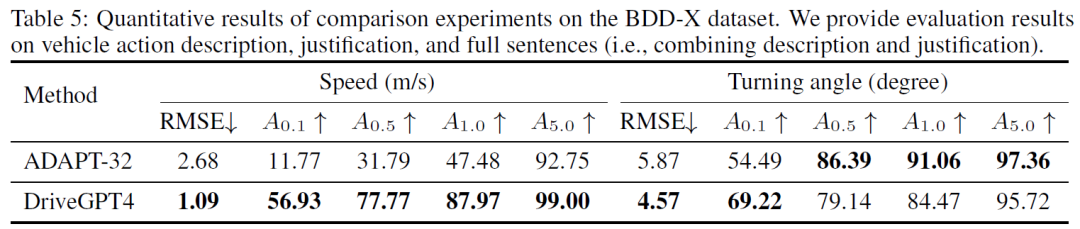
定量结果。在去除带有错误控制信号标签的样本后,BDD-X测试集中的所有其他样本用于控制评估。先前最先进的(SOTA)方法ADAPT和DriveGPT4的定量结果如表5所示。DriveGPT4实现了卓越的控制预测结果。
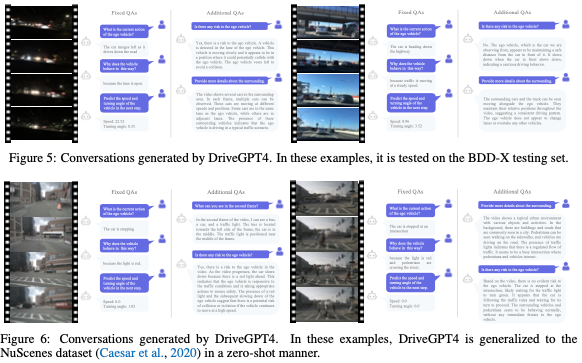
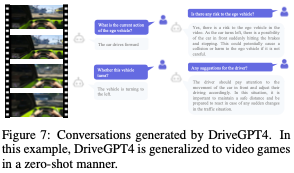
我们进一步提供了多种定性结果,便于直观比较。首先,BDD-X测试集的两个示例如图5所示。然后,为了验证DriveGPT4的泛化能力,我们将DriveGPT4应用于图6中零样本会话生成的NuScenes数据集。最后,我们在视频游戏上尝试DriveGPT4,以进一步测试其泛化能力。一个例子如图7所示。
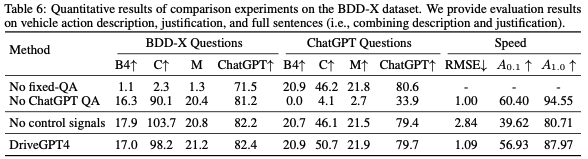
消融实验如表6所示:
本文介绍了DriveGPT4,一个使用多模态LLM的可解释的端到端自动驾驶系统。在ChatGPT的帮助下,开发了一个新的自动驾驶解释数据集,并用于微调DriveGPT4,使其能够响应人类对车辆的提问。DriveGPT4利用输入视频、文本和历史控制信号来生成对问题的文本响应,并预测车辆操作的控制信号。它在各种任务中都优于基线模型,如车辆动作描述、动作论证、一般问题分析和控制信号预测。此外,DriveGPT4通过零样本自适应表现出强大的泛化能力。

原文链接:https://mp.weixin.qq.com/s/tIuMUdTlp1_R-D06kRO8Qg
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK