

全志V3S嵌入式驱动开发(软、硬件调试方法总结)
source link: https://blog.csdn.net/feixiaoxing/article/details/131526910
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
v3s开发板本身是比较小巧的,ddr也是嵌入在soc里面的,电路设计也不复杂,因此很受电子爱好者的喜欢。不过大部分朋友一般都是自己把电路板设计出来,然后烧入别人的镜像测试的。这样虽然也有一定的可玩行,不过还是建议大家可以自己多多熟悉嵌入式软件方面的内容,这样或许更有乐趣的多。下面结合近一段的调试经历,总结一下linux+soc调试的经验。
1、soc电源十分重要
soc上面电源很多,比如一颗soc,就可能有3.3v、2.5v、1.8v、1.2v等多种规格的电压。好一点的soc,厂家会搭配一个pmu。如果没有pmu,也会用ea3036这样的芯片,做一个简单的电源管理电路。实在没有办法了,才会选用不同的dcdc,调制不同的电压,这些都是可以的。
电源是电路的基础,没有电源一切都无从谈起。如果板子不工作了,我们的第一个反应往往也是用万用表查一下电压,看看哪里短路了,哪里断路了,这些都是常用测试的方法。毕竟没有电源,信号的有无、信号的质量,这些都无从谈起。
v3s板子上面有三个晶振。两个是soc的,一个是wifi电路的。其中soc的两个晶振用途也各不相同,一个是作为倍频pll使用,一个是作为rtc使用。相比较而言,后者的精度更高一点。而wifi模块一般也会要求搭一个晶振模块。除了电源之外,晶振也是比较容易出问题的地方。倒不是晶振电路有多难,主要是在电商网站上面很容易买到假的晶振,这个也是经常发生的现象。解决的办法就是去正规旗舰店购买,贵一点,但好歹是真的。
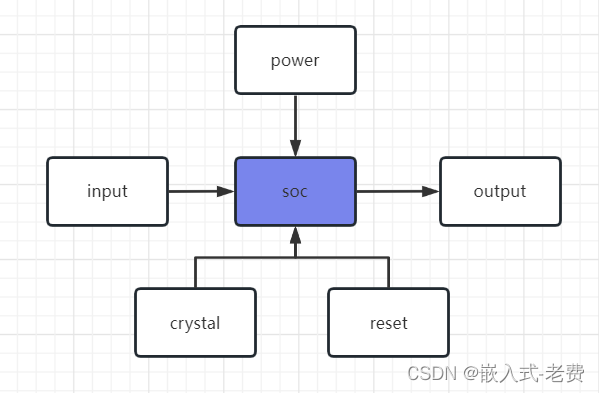
有过嵌入式开发经验的朋友都知道,电源、晶振、复位、输入、输出,这是系统boot起来的5个基本条件。电源前面已经谈过,复位比较简单,输入输出可以用按键和点灯代替,所以这里如果搞定了晶振,用示波器测出了晶振的信号,那么整个最小电路基本就ok了。
3、基于sd卡开发linux
目前主要的soc基本都支持micro sd卡启动。当然,除了micro sd卡,他们也支持spi-nor、spi-nand、usb、jtag等启动方法。整体来说,micro sd卡调试是最方便的。在最初一行代码没有的时候,就可以把uboot编译生成的bin文件用ubuntu的dd命令写入到micro sd卡上,这是非常便捷的方法。
此外,micro sd卡还有很多其他的优势。比如,micro sd卡很大,一般来说,它要比spi-nor、spi-nand、emmc大得多,最小的都有8g、16g。因此哪怕最终发布嵌入式系统的时候,我们不用micro sd卡启动,但是在开发的时候,最好还是用micro sd卡,毕竟太方便了。它也不需要jtag工具,有一个虚拟机,有一个usb的读卡器,这样就可以进行linux开发了,从uboot到kernel、rootfs、app,就没有它不能干的。
等micro sd卡port好linux、rootfs之后,就可以慢慢引入spi-nor、spi-nand驱动,直到生成支持spi-nor、spi-nand的uboot和image,这个时候再从flash启动uboot和linux系统,开发过程就会容易很多。
不同的boot方式,就是uboot是不一样的,linux和rootfs基本差不多的。所以sd卡boot方式下,如果搞定了大部分驱动和应用软件开发,那么产品只要简单切换到spi-nor、spi-nand、emmc启动就可以了。
4、不要把所有的驱动都放在zImage
所有的驱动都放到zImage,一个最大的坏处就是,这个zImage会越来越大。这样就要求我们在后期移植spi-nor、spi-nand的时候,需要不停调整image的布局。dtb留多大,zImage留多大,rootfs留多大等等,一个大小变了,其他就要跟着改变,很麻烦,关键是还比较容易出错。所以,关于内核功能和驱动这一部分,可以把不常用的驱动、或者比较大的驱动放在文件系统里面,或者挂载到外面存储设备,等rootfs后面起来之后,动态加载,这也是可以的。
5、基于u盘的用户程序调试
说完了zImage,下面就是用户程序。不是所有嵌入式最终都可以接受micro sd卡启动的,毕竟如果是运动的嵌入式设备、或者工业设备,这个micro sd卡还是存在一定的风险的。但是spi-nor和spi-nand又比较小,空间也不大,这就是一个问题,调试会很不方便。比如,spi-nor一般也就32MB,而spi-nand则为128M,可大一点的文件就会占据很大的空间。
所以这个时候,一个比较好的方法,就是把程序、动态库和配置文件copy到u盘上。等嵌入式起来之后,把u盘mount到/mnt目录,这样就可以继续后面的测试了。
中间依赖的动态库如果也在u盘上面,那么LD_LIBRARY_PATH也要做修改,
export LD_LIBRARY_PATH=/mnt/v3s/tslib/lib:$LD_LIBRARY_PATHwindows的很多文件系统,比如fat可能不支持软链接这种形式。其实也没有关系,直接cp文件,换一个文件名就可以了,比如像这样,
cp libts.so.0.10.4 libts.so.0做好了这些准备,u盘上有一些配置文件的话,那么涉及到的环境变量也需要修改一下,
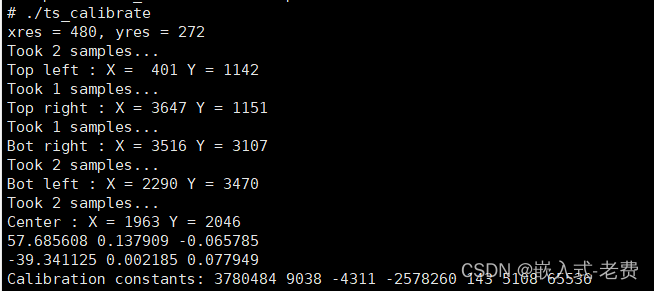
做到了上面这些内容,基本上u盘上面的程序也可以正常运行了,使用还是很方便的。下图就是利用u盘上的ts_calibrate进行标定的过程打印,
6、勤用对比法看驱动问题
实际开发的时候,我们经常遇到这样一个问题。那就是相同的驱动,升级了内核之后,之前好的功能就不行了,这个时候就要勤用对比法,看看之前的配置是什么,现在的配置是什么,两者有什么差别。比如之前wifi驱动的问题,关于配置这块,如果用对比法,其实很容易看出区别的。因为kernel 5.2.y是这么配置的,
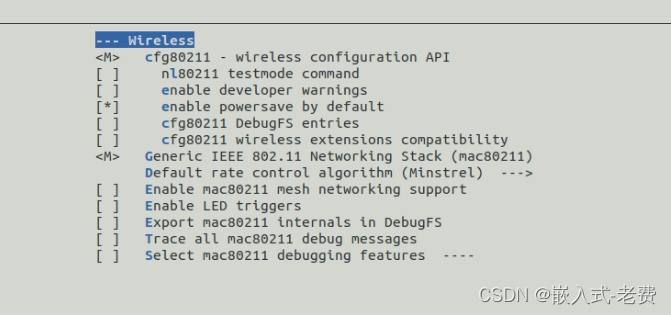
而之前kernel 4.14.y却是这么配置的,
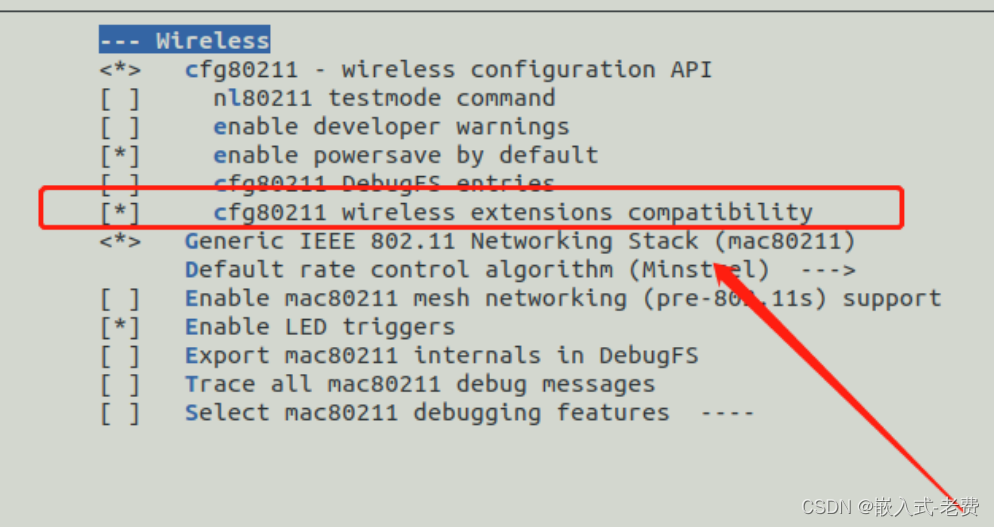
对比下,这样就比较方便比较看出来,真正有区别的地方,就是中间红框有没有选中。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK