

集成电路仿真器(SPICE)的实现原理 - TheWind
source link: https://www.cnblogs.com/the-wind/p/14399415.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

本文系统地介绍类SPICE集成电路仿真器的实现原理,包括改进节点分析(MNA)、非线性器件建模、DC/AC分析、时域/(复)频域仿真以及涉及的数值方法。
基于本文原理,实现了SPICE-like仿真器:https://github.com/cassuto/CSIM
1 理论基础#
任何集总参数电路都能依据基尔霍夫电流定律(KCL)、基尔霍夫电压定律(KVL)和支路约束方程建立模型并通过解析法或数值法求解,进而实现计算机辅助电路分析(CACA,Computer Aided Circuit Analysis)。
CACA核心:
1. 建立电路数学模型:
- a)
拓扑约束:利用图论分析电路,建立KCL、KVL方程。常见方法包括割集电压法、节点分析(NA, Nodal Analysis)法和C.W. Ho[1]提出的改进节点分析(MNA, Modified Nodal Analysis)法等。UC Berkeley开发的SPICE即采用MNA方法[7]。 - b)
元件约束:根据元件的物理特性和分析的目标建立VCR约束。(复)频域分析可使用s域模型或相量(正弦稳态)模型建立VCR约束;时域分析则可用微分代数方程(DAE)建立VCR约束,或先使用s域模型求解最后进行Laplace逆变换。
2. 求解数学模型。主要有解析法和数值法两种。并非所有模型都容易找到解析解。常采用数值方法,对于线性方程组,可用LU分解法等;对于非线性方程,需通过迭代法将其线性化。对于微分方程,常使用数值积分。
3. 分析模型。主要进行误差和灵敏度分析。
CACA把上述过程总结为一套算法,让计算机自动完成。
2 术语约定#
在不同参考资料中,相关术语的定义各有差别。本文统一采用如下规定:
- 网络(Network):描述电路拓扑的无向图(带参考方向时为有向图),用G(V,E)表示;
- 网表(Netlist):网络的一个实例;
- 端子(Pin):元件的接线处;
- 端口(Port):一对端子构成一个端口;
- 节点(Node):连接两个或两个以上端子的交汇点;
- 支路(Branch):对于一个二端元件,若两个端子分别接在节点s和t上,则该二端元件构成一条支路(s,t)∈E;
- 关联(Associative):给定节点n,如果存在支路(s,t)∈E满足s=n或t=n,就称该支路与节点n关联;
- 回路(Circuit):如果从节点n0出发,能沿与之关联的支路b0到达节点n1,再以n1为起点,重复上述过程并最终返回节点n0,并且形成的访问序列<n0,b0,n1,b1,⋯,n0>没有重复的节点,则该序列指出一个回路;
3 改进节点分析(MNA)前置内容#
MNA是节点分析(NA)的增广,这里先介绍NA,如果您对此熟悉可以跳过本节。
3.1 NA方程的推导#
我们从拓扑学角度推导NA方程。
将电路抽象为网络。首先为网络中各支路指定电流参考方向,使其成为有向网络,设其关联矩阵为:An×b=[ajk]={1,支路k参考电流从节点j流出−1,支路k参考电流从节点j流入0,支路k与节点j无关联
其中n为节点个数,b为支路个数。
设支路电压向量为U=[u1,u2,⋯,ub]T;支路电流向量为I=[i1,i2,⋯,ib]T。
根据KCL定律[2]:
其中Is=[is1,is2,⋯,isn]T为注入电流,isj>0表示电流注入节点j,反之表示电流流出节点j。
设节点电压向量为Un=[un1,un2,⋯,unn]T。在网络中任意选定一个节点作为参考节点,对于余下(n−1)个节点,规定节点电压为该节点相对于参考节点的电位差。
根据KVL定律[2]:
设支路导纳矩阵为:
通过导纳描述支路约束方程:
将式(2)代入式(3),得到:
再将式(4)代入式(1)中,得到:
令Y=AGAT,最终得到节点分析方程:
其中Y称为节点导纳矩阵。
给定网表可计算节点导纳矩阵Y,也可由电流源支路确定Is(若无,置0)。最后只需解上述线性代数方程组,即可得出节点电压Un。
3.2 节点导纳矩阵的物理意义#
上节已经推出节点导纳矩阵的表达式:
按照关联矩阵的定义,若支路k与节点i或j无关联,则aikajk=0。若支路k与节点i与j均有关联,则aik=±1且ajk=∓1,此时有aikajk={−1(i≠j)1(i=j)。
由此可知,b∑k=1gk⋅(aikajk)=yij (i≠j)的物理意义为:若节点i与节点j之间有直接关联的支路(i≠j),则yij就是两节点i和j之间关联的所有支路的导纳之和取负数,否则yij=0。把它定义为互导yij (i≠j)。
b∑k=1gk⋅(aikaik)=yii的物理意义为:yii=n∑j=1j≠iyij,即所有与节点i直接关联的支路的导纳之和,把它定义为自导yii。
于是节点导纳矩阵就能简单表示为:
下面以一个实例来说明这种表示的好处:
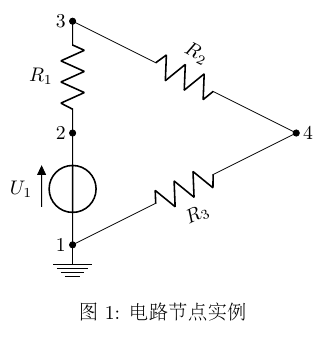
按照自导和互导的物理意义,就能直接知道节点1的自导y11为R3和U1的电导之和,节点1到2的互导y12为U1的电导取负数,其它同理,可直接得出节点导纳矩阵如下:
需要注意y1,3=y3,1=0,y2,4=y4,2=0,因为节点1和3、2和4之间没有直接关联的支路。另外,因为U1是理想电压源,GU1=∞,因此这个电路用NA无法直接求解,这个例子揭示了NA的局限性。
4 改进节点分析(MNA)的原理#
节点分析(NA)直接处理含无伴电压源(内阻为0)的支路时会遇到困难,因为这些支路的导纳为无穷大,方程无法求数值解。上文图1中的U1就属于这种情况。
MNA解决NA局限性的思路很简单:对NA方程组进行增广。NA只分析节点电压,而MNA能同时分析支路电流,将两种状态变量混合在一起求解。
MNA混合方程如下:
其中Y是节点导纳矩阵;U是节点电压向量;I是节点电流向量,对应方程YU=I与NA无异。此外,J是支路电流向量,B、C、D、E是新增加的方程的系数矩阵。
这些系数矩阵用“橡皮图章”法(Rubber Stamps)机械地生成[1],实现电路分析的程序化。
4.1 方程生成算法#
C.W. Ho提出的元件橡皮图章算法(Element Rubber Stamps)[1]可以根据网表直接生成各子矩阵的值。算法初始时Y=B=C=D=I=E=0。遍历网表中所有元件,每遇到一个元件e,就将该类型元件对应的贡献值c(e)加到相应的子矩阵,遍历结束时各子矩阵就有了正确的值,从而直接产生方程组。因为每种元件的贡献值是常量,可以将贡献值编制成表格,也称为“表格法”。
在稍后的推导中可以看到,算法“将贡献值加到对应子矩阵”的的理论依据是线性电路的叠加性。MNA本来只能处理线性电路,但是稍后可以看到如何利用线性化处理非线性电路。
方程生成算法可以描述为:
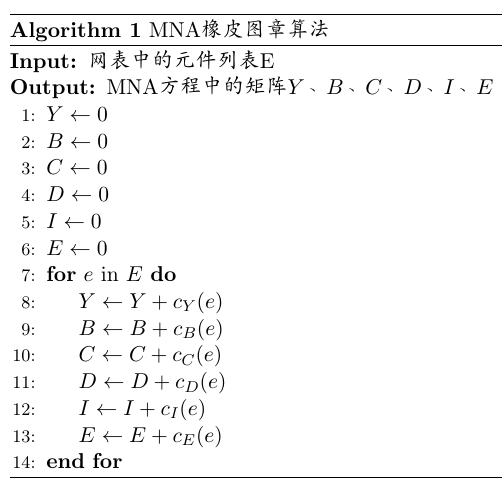
算法的关键是贡献值cY(e)、cB(e)、cC(e)、cD(e)、cI(e)、cE(e)。
下面推导了一些常见一端口和二端口线性元件的贡献值。
4.2 常见一端口线性元件对Y、B、C、D、I、E的贡献#
假设一端口元件所在支路为k,电压与电流取关联参考方向s→t。
4.2.1 阻抗元件#
设元件导纳为y,支路约束方程为:
其中ik为元件所在支路电流。
整理上式得:
对应MNA矩阵形式为:
如果多个阻抗元件并入支路,则支路的导纳就是它们之和。因此每当一个阻抗元件并入支路s→t时,只需在MNA方程的分块矩阵Y中加上导纳:
即加上贡献值:
4.2.2 独立电压源(VS)#
设VS的电压值设定为es。支路约束方程为:
其中ik为VS所在支路的电流。
对应MNA矩阵形式为:
如果多个电压源串在同一支路,则支路电压为它们之和,因此每当一个VS串入支路s→t时,只需加上贡献值:
4.2.3 独立电流源(CS)#
设CS电流值设定为ik,支路约束方程为:
如果多个电流源并入支路,则支路总电流就是它们之和,因此每当一个CS并入支路s→t时,只需加上贡献值:
上述这些例子其实反映了线性电路的叠加性。这就是为什么任何元件加入电路时都只需在MNA对应矩阵加上贡献值。
4.3 常见二端口线性元件对Y、B、C、D、I、E的贡献#
假设元件的端口1所在支路为k,电压与电流取关联参考方向s→t;端口2所在支路为c,电压与电流取关联参考方向p→q。
4.3.1 电压控制电压源(VCVS)#
设VCVS电压放大倍数为μ,控制电压为(up−uq)。支路约束方程为:
其中ik为VCVS受控端口所在支路的电流。
对应MNA矩阵形式为:
可知每当一个VCVS加入支路s→t、p→q时,贡献为:
4.3.2 电压控制电流源(VCCS)#
设VCCS的转移电导为g,控制电压为(up−uq)。支路约束方程为:
对应MNA矩阵形式为:
可知每当一个VCCS加入支路s→t、p→q时,贡献为:
4.3.3 电流控制电压源(CCVS)#
设CCVS的转移电阻为r,控制电流为ic,支路约束方程为:
其中ik为CCVS受控端口所在支路电流。
对应MNA矩阵形式为:
可知每当一个CCVS加入支路s→t、p→q时,贡献为:
4.3.4 电流控制电流源(CCCS)#
设CCCS的电流放大倍数为α,控制电流为ic。支路约束方程为:
对应矩阵形式为:
可知每当一个CCCS加入支路s→t、p→q时,贡献为:
5 稀疏矩阵计算#
对于线性电路,按照上述方法可以建立MNA方程:
直接采用高斯列主元素消元法、LU分解法、雅各比迭代法等都能求解上述方程,具体参考教科书[3]。
但是,求解稠密矩阵方程需要O(n3)的时间。如果观察到电路对应的系数矩阵A是稀疏矩阵,就可以使用更优化的算法,因为而稀疏矩阵中存在大量零元素,利用稀疏矩阵算法,存储和计算时都可以跳过大量零元素,从而使算法所需的时间和空间大幅减少。
6 非线性元件的分析#
MNA可以方便地分析线性电路,但无法直接处理非线性电路。
幸运的是,如果利用迭代法将非线性元件线性化,使每一步迭代都能用等效的线性元件替代,就能利用MNA分析和求解非线性电路。SPICE就采用这种方法[7]。
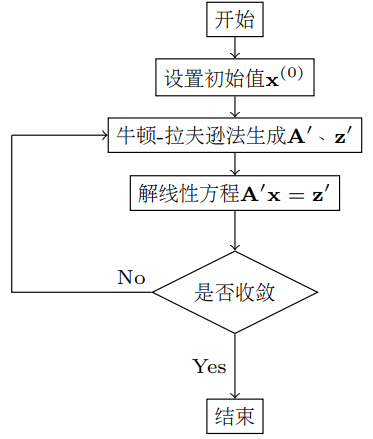
6.1 牛顿-拉夫逊法求解非线性MNA方程#
牛顿-拉夫逊法(Newton-Ralfsnn's method)是最常用求解非线性方程近似根的算法。
牛顿-拉夫逊法通过如下迭代格式计算非线性方程f(x)=0的近似根x:
根据MNA方程(11),设
根据式(12):
这其中涉及的雅克比矩阵有:
利用雅可比矩阵将式(12)改写为:
再将式(13)代入,整理可得迭代格式:
即A′(x(k))⋅x(k+1)=z′(x(k)),可见迭代格式与线性代数方程组形式保持一致。给定初值x(0),计算A′(x(0))、z′(x(0)),然后求解线性代数方程组,得到x(1),再将x(1)作为新的初值,重复上述过程,生成迭代序列{x(k)},直到‖x(k+1)−x(k)‖小于设定的误差限时,可认为迭代收敛,取近似根˜x=x(k+1)。
牛顿-拉夫逊迭代的本质是将非线性问题分成若干线性问题,这就启发我们用该方法实现元件的线性化,从而允许用MNA分析非线性元件。
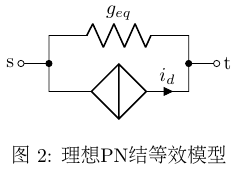
6.2 理想PN结模型#
理论上任何非线性元件都可以用动态电压源或电流源等效代替。为了便于应用MNA,这里使用动态电流源代替。
设理想PN结位于支路s→t上,理想PN结电流的近似方程为:
其中I0为反向饱和电流,UT为温度电压当量,这两个参数都是由物理特性决定的。
将PN结作为动态电流源注入支路s→t,根据独立电流源支路的结论(9),有:
代入牛顿-拉夫逊迭格式(15):
对比之前推出的阻抗元件支路的结论(式5),可以认为(16)描述的是等效电阻,其电导gd(k)随迭代次数k动态变化,然而在本轮迭代内是不变的,可视作线性元件:
再考虑式(15),右边式子可展开为:
从物理意义上看,式(18)描述的是动态电流源id与动态电阻geq并联,如图2所示,这样就实现了元件的线性化,每次迭代都可以用MNA分析了。
至此式(15)左右两边都已确定,得到MNA方程组:
每当一个理想PN结加入支路s→t时,只需对子矩阵作如下更新:
值得注意的是整个求解过程是迭代进行的,每轮迭代都要重新计算等效电路的参数并重新求解MNA,即:
给定初值x(0)(这其中包含PN结两端的节点电压us(0)、ut(0)),代入式(16)和式(17)可得线性代数方程组(19),解线性代数方程组可以得到x(1),再将x(1)作为新的初值,如此迭代。当相邻两次迭代获得的解x(k+1)与x(k)满足‖x(k+1)−x(k)‖<ϵ时,就可认为迭代收敛,可以取近似解x(k+1)。
下面给出了非线性电路分析的算法流程。
6.2.1 收敛性问题#
在PN结特性方程的牛顿-拉夫逊迭代中,存在如下图所示的异常情况:

图中第k+1步迭代时,由于指数函数的迅猛增长,i(k+1)d超出机器数所能表示的范围,产生上溢,使得迭代无法进行下去。
考虑到实际电路中不可能出现如此大的电流(双精度浮点数最大值约为10308);另外在结电流方程中,当y急剧增长时,x的变化范围却很小。因此可以将PN结电压限制在较小范围内,以避免数值溢出[6]。
PN结临界电压是V-I曲线中曲率半径最小的点,当PN结电压大于临界电压时,结电流开始急剧增加,因此可用PN结临界电压Uth作为阈值的参考。
一种最简单的阈值限制算法是x′=max(x,10Uth),将结电压限制在10Uth以下,但限制后的V-I曲线在Ud=10Uth处的导数不存在,大于10Uth后导数为0,造成不收敛。
SPICE中的限制算法[7]更合理,当Ud>Uth时,采用以电流Id为变量的迭代(解决反函数);当Ud≤Uth时,采用正常的迭代格式。
6.3 收敛条件#
对于MNA方程中的节点电压U和支路电流J,SPICE采用独立的收敛条件。设ξr为相对误差限,ξ为绝对误差限。当:
并且,当|J(k+1)b−J(k)b|≤ξr⋅Jb,max+ξ时,认为迭代收敛。
其中Un,max=max(|U(k+1)n|,|U(k)n|);U(k+1)n,U(k)n为相邻两次迭代的结果。Jb同理。
7 直流扫描分析(DC Sweep)#
至此,我们搭建的框架可以实现SPICE的第一个应用——直流扫描分析,即遍历参数,输出各参数下电路的静态工作点。
7.1 特殊情形#
直流分析反映的是输入为直流(即频率ω=0)时的状态,需要特殊处理动态元件。
电容在直流下的容抗为limω→01jωC=∞,显然直流分析时电容应视为两端开路。
电感在直流下的感抗为limω→0jωL=0,显然直流分析时应视为两端短路。
此外所有作为信号源的电压源视为短路、作为信号源的电流源视为开路。
7.2 直流分析的过程#
设目标参数p,扫描范围[pmin,pmax],扫描步长s。线性扫描共需要pmax−pmins次方程求解,每次将目标参数设定为p(n)=pmin+ns,通过改进节点分析(MNA)建立的方程解出对应的节点电压U(n)。这样U(n)就形成了直流扫描分析的结果。
实用中,有时需要使用对数步进来扫描。
8 交流扫描分析(AC Sweep)#
AC Sweep分析是正弦稳态电路在频域上的小信号分析。输入变量是正弦频率ω,输出变量是电路中各节点电压的频率响应(幅度和相位)。
交流分析采用相量法,电压电流都采用相量表示,仍然利用MNA求解,只不过MNA中各矩阵都定义在复数域上。
8.1 电容的相量模型#
理想电容在正弦稳态电路中的VCR表示为
每当一个理想电容加入支路s→t时,只需对MNA的子矩阵的值作如下更新:
8.2 电感的相量模型#
类似地,理想电感在正弦稳态电路中的VCR表示为
每当一个电感加入支路s→t时,只需对MNA的子矩阵的值作如下更新:
8.3 交流分析的过程#
交流分析非常重要的假设是小信号。在小信号模型中,非线性元件可以在静态工作点处线性化,例如PN结可通过动态电阻gd(u)等效。因此在进行交流分析之前,先进行直流分析,确定电路静态工作点。静态工作点确定,式(15)中所有雅克比矩阵的值也都确定。这样在交流分析时,不必迭代,而是将其视作线性方程来处理。
9 复频域分析(s域)#
对电路的微分方程进行Laplace变换可以得到s域上的代数方程,这些代数方程可以用与上一节AC分析相同的方法建立和求解。事实上,上节所述的相量模型可以看作s=jω的特殊情况,这也反映了频域和复频域的关系。
s域的MNA混合方程变为:
9.1 Laplace变换#
给定时域激励信号f(t),可通过Laplace变换得到复频域上的激励F(s)=L[f(t)],将F(s)代入激励源模型中,求解MNA方程即可得到节点电压和分支电流的频域响应[U(s)J(s)]T。
9.2 Laplace逆变换#
对于上面得到的频域响应,可通过逆变换得到时域响应[L−1[U(s)]L−1[J(s)]]T。
10 瞬态分析(时域分析)#
上节给出了从复频域变换到时域的分析方法,下面直接在时域进行分析,这也是SPICE采用的方法。
时域上理想电容和电感的VCR为常微分方程:
计算机无法直接处理连续时间系统。可以将时间离散化,然后利用数值方法求解。
10.1 线性多步:隐式GEAR法#
对于电容或电感特性方程中所出现的形如f(x,t)=dxdt的常微分方程,可通过积分x=∫f(x,t)dt来求解。
根据黎曼积分的定义,连续时间域上的积分x=∫f(x,t)dt可通过离散时间域上的累积来近似:
其中hn=tn+1−tn称为第n步的步长。
将式(20)写成迭代格式:
这是一阶显式单步法。单步法的收敛性可参考资料[3]90−92。为了获得更精确的解,这里采用线性多步法。线性多步法是前p步解的线性组合,单步法正是线性多步法的特例。
其中p是步数。ai、bi是常系数。
利用泰勒展开构造线性多步法[5],ai、bi应满足:
选取一些特殊的p、ai、bi值,就能构造出不同的迭代方法。当b−1≠0时为隐式方法,当b−1=0时为显式方法。对于隐式GEAR:
给定阶数k=1,2,⋯,联立式(23)与式(22)可以解出系数ai、bi。从结果来看,一阶隐式GEAR就是隐式欧拉法(Implicit Euler's method)。4阶隐式GEAR迭代格式如下:
10.2 线性多步法中的迭代#
在线性多步法迭代格式(21)中,式子左侧为待求的量xn+1,而式子右侧也依赖于待求量xn+1,因此待求量无法直接计算。解决办法是解方程,设方程f(xn+1)=xn+1−∑pi=0aixn−i+hn∑pi=−1bif(xn−i,tn−i)=0,则只需通过迭代解出该方程的根xn+1即可。迭代格式为:
迭代到‖xm+1n+1−xmn+1‖小于给定误差限时,可以取xn+1=xm+1n+1。
10.3 预报-校正法#
从上节可以看出,每步线性迭代中又包含若干xm+1n+1=g(xmn+1)这样的迭代。初值x0n+1的选取将直接影响到迭代次数,因此初值的选取十分重要。相比于随机给定一个初值,通过预报器预测的初值可能更接近真实值,再进行线性多步迭代时,所需迭代次数将减少。
这里采用显式欧拉法实现预报器,预报值x0n+1计算为
10.4 自适应步长控制算法#
瞬态分析中,如果时间步长hn选取过大会造成局部截断误差偏大,甚至得出完全错误的结果;而如果步长选取太小则会使得计算量增加,而固定步长在某些区间内往往不是最优,因此一般采用变步长算法。
由6.3节可知,hn的选取应使得第n步的局部截断误差ξ(n+1)L=|x(tn+1)−xn+1|满足:
其中ξ是设定的绝对误差限;ξr是设定的相对误差限。一般来说局部截断误差无法精确计算,只能通过Milne公式估计。
自适应步长控制中,先设定一个足够小的初始步长h0,每进行一次迭代,就计算出本次迭代的局部截断误差ξ(n+1)L,再通过式(24)判定步长的好坏:
- 若q>1,则说明局部截断误差大于设定的误差限,步长偏大;
- 若q<1,则说明局部截断误差已经小于设定误差限,若q远小于1则说明步长过小。
根据q对步长进行动态调整:
其中k是线性多步法的阶数。
假设当前仿真时间为tn+1,首先利用线性多步法求出解xn+1,再估计局部截断误差ξ(n+1)L,按上式计算新步长h′n+1,若h′n+1<hn+1,则说明局部截断误差过大,此时仿真时间不向前推进,而是按新步长重新计算当前时间的解xn+1,重复上述过程;反之则说明局部截断误差已经满足要求,仿真时间可以推进到tn+2,令hn+2=h′n+1,结束本次步长调整。
下图为瞬态仿真实例:
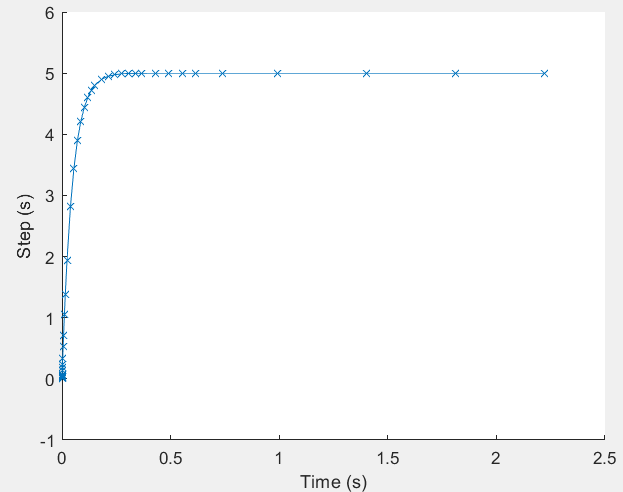
图中显示了步长自适应调整,时间轴是均匀的。
10.4.1 断点#
算法能保证每步迭代局部截断误差的估计值不超出规定的误差限,然而,每次调整步长都要重新计算线性方程组,对于信号快速变化的电路(例如开关电路),步长可能会频繁振荡,从而使仿真器将大量时间花费在寻找合适的步长上。
另一个问题出现在维持大步长时(如上图中的平稳部分)突然发生离散事件。在混合数字仿真中,波形存在大量间断点(电平跳变的瞬间)。步长过大会直接越过间断点。需要注意在事件驱动的数字仿真系统中,模拟仿真的误差估计并不会考虑离散事件造成的的跳变,这就是为什么自适应步长控制会失败。
因此,涉及数字-模拟混合仿真时,必须使用断点(simulink中称为过零检测)技术,在电平跳变之前插入断点。使模拟仿真器在时间到达断点前,强制减少积分步长,避免错过离散事件。对于模拟仿真,特别是涉及受控开关时,断点同样重要,可有效避免步长振荡。
稍微解释一下为什么数字仿真可以预测电平跳变。每个事件从进入队列到被调度执行,需间隔该事件指定的延时,因此事件的执行总是慢于入队。在事件入队时,就可预知断点的位置(入队时间+延迟),从而提前通知SPICE仿真器。
以后有机会可能补充离散-连续系统联合仿真的方法。
10.5 常见储能元件的时域模型#
10.5.1 电容的时域模型#
电容的时域特性描述为:
利用线性多步法(21)得到迭代格式:
将上式展开并移项(b−1≠0),可得
geq从物理上可解释为等效电导,ieq从物理上可解释为等效电流源,于是得到了电容的等效线性化模型,如图4所示。
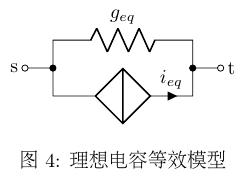
根据之前推出的阻抗元件支路对MNA各子矩阵的贡献(式6)和独立电流源支路对MNA各子矩阵贡献值(式9)可知对应MNA方程为:
因此可知每当一个电容加入支路s→t时,只需对MNA各子矩阵作如下更新:
同时应在程序中应设置标记,指出参数geq(n)和ieq(n)是需要迭代计算的。给定步长hn,初值u0=us(0)−ut(0),根据上式生成MNA方程,可解出节点电压us(1)、ut(1),以此类推。
10.5.2 电感的时域模型#
电感的时域特性描述为:
利用线性多步法(21)得到迭代格式:
整理并移项(b−1≠0),可得
从物理意义上看,电感可等效为动态电阻req与独立电压源ueq串联,如图5所示。
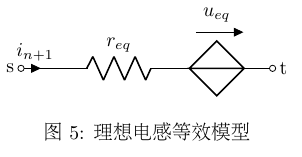
根据之前推出的独立电压源的贡献值(式8)和电流控制电压源支路对MNA各子矩阵贡献值(式10)可知对应MNA方程为:
因此每当一个电感加入支路s→t时,只需对MNA各子矩阵作如下更新:
同时应在程序中应设置标记,指出参数req(n)和ueq(n)是需要迭代计算的。
10.6 时域分析总流程#
- 1 初始化:建立MNA方程。设置当前时间t=0,设置积分步s、阶数ord为初值
- 2 用s、ord计算GEAR系数
- 3 解MNA方程(流程图见6.2)
- 4 更新时间t′=t+s
- 5 检查断点列表,动态调整积分步s、阶数ord
- 6 判断终止条件,不终止则循环执行 2
11 程序实现#
详见文章开头给出的github链接。
参考资料#
[1] C.W. Ho; Ruehli, A.; Brennan, P. The modified nodal approach to network analysis[J]. IEEE, doi:10.1109/tcs.1975.1084079, 1975: 0–509.
[2] 邱关源. 电路[M]. 第5版, 高等教育出版社, 2006: 391-392.
[3] 李建良等. 计算机数值方法[M]. 东南大学出版社, 2009.
[5] Timothy Sauer. Numerical Analysis[M]. 2nd Edition, George Masonry University, 2011: 336-339.
[6] Thomas L. Quarles. Analysis of performance and convergence issues for circuit simulation[R], University of California, Berkeley Technical Report No. UCB/ERL M89/42, 1989: 30-31.
[7] L. W. Nagel. SPICE2: A Computer Program to Simulate Semiconductor Circuits[R]. University of California, Berkeley Technical Report No. UCB/ERL M520, 1975: 138-142
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK