

不是说有主动安全吗,怎么还是撞上了?
source link: https://www.ifanr.com/1536830
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

「主动安全」这四个字很有分量。
如果你在近两年买车,很可能已经对这四个字有些许概念,也可能曾经在销售的的吹嘘中了解到:
我们这个车,遇到危险能自动刹车!
多好的技术啊,从此驾驶不必过于提心吊胆,无需担心路上的突然窜出的「鬼探头」,交通事故也会大幅减少……
你这么想着,满意的买下了车。

可事实是,近期几起关注度很高的严重交通事故,涉事车辆都配备了主动安全技术。事故的原因有待调查,但估计有不少人心中都有一个疑问:平时大力宣传的主动安全技术,关键时刻怎么派不上用场了?
帮你刹住车,需要几步?
准确来说,「遇到危险能自动刹车」的技术叫 AEB 自动紧急制动系统(Autonomous Emergency Braking),这是主动安全中的一部分,也是不少人最为看重的部分。
1996 年,奔驰在自家的 S 级与 SL 级上配备了名为 BAS 的刹车辅助系统。

▲W140 S-Class
与如今我们理解的 AEB 不太一样的是,这一系统并不能「全自动」踩下刹车,而是通过检测驾驶者踩下制动踏板的速度来确认驾驶者意图,如果系统判断为紧急情况,则会自动将制动力提升至最大。
说人话,就是在你急着踩刹车,却踩得不够果断的时候,帮你一脚踩到底。但这一功能并不能在驾驶者无制动操作的情况下自动刹车。
到了 2008 年,沃尔沃带来了初代 City Safety 系统,这是首个符合我们当下认知的 AEB 自动紧急制动系统。
这一系统在检测到危险时会预先发出警告(即 FCW 前方碰撞预警功能),而如若驾驶员没有做出反应持续前进,车辆则会采取紧急制动,避免碰撞。这一逻辑已与目前的 AEB 工况无异。

在发展过程中,AEB 还带来了不少升级。
受限于硬件能力,早期的 AEB 的工作范围十分有限,多数早期 AEB 仅能在 4~30km/h 的时速范围内发挥作用,且易出现漏检错检的情况。这显然是不够的。
随着算法、毫米波雷达与车载摄像头的共同进步,如今的多数 AEB 都能做到在 60km/h 甚至 80km/h 时速下做出判断并采取制动措施,检测范围、精度也得到了明显提升。
在条件允许的情况下,部分 AEB 还能在减速到安全速度后解除制动,让车辆往前滑行,而非直接刹停。这除了能让车内的乘客体感冲击变小,也能规避后车的追尾。
而在激光雷达上车的大环境下,拥有更强穿透性,探测范围更远的前向车载激光雷达自然也值得好好利用。
比如理想就在最近将激光雷达融合进了 AEB 系统内,进一步提升车辆的判断距离,同时应对光线不足等视觉摄像头较难判断的工况。
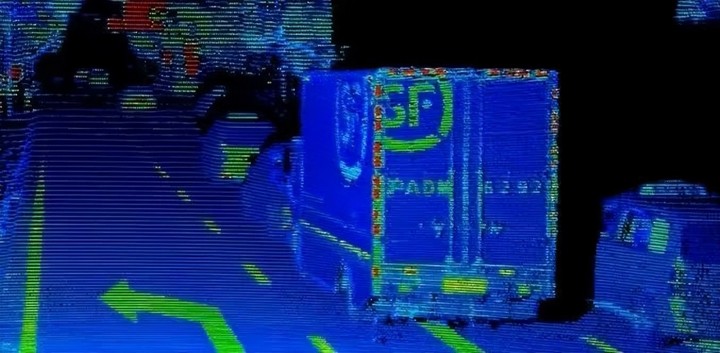
▲融合激光雷达后看到的世界
可以预见的是,利用激光雷达或其他感知系统强化 AEB 能力的车企只会越来越多,AEB 的判断精度、速度上限等等在未来都还有不小的提升空间。而这一切都是为了在正确的时间帮你踩下刹车,避免事故的发生。
说得这么好听,怎么还是撞上了?
但是,凡事都怕一个但是。
- 辅助驾驶很强,但它目前属于 L2 级,出了事由驾驶员负责;
- 终身保修很香,但只针对首任车主;
- AEB 很好,但它依旧有错检、漏检、不启动的可能。
首先,几乎所有的 AEB 都有最低启用速度,如 4km/h 或 8km/h,从而避免在低速挪车等场景下的误触发,这就意味着规避低速下的剐蹭并不属于 AEB 的范畴。
而即便在工作区间内,AEB 的触发也会受到各种限制。
只要在人流较为密集、管理较为松散的路面上开过车,你大概率已经受过「鬼探头」的惊吓,这些从阴影或被遮挡处窜出的行人/自行车总是能让人虎躯一震。

而对于 AEB 来说,这也同样棘手,算法并不能提前感知行人的存在,也就很难进行预判乃至制动,而即便是感知到了,留给制动的时间也可能已经不够,正所谓「神仙难救」。
另外,在夜间以及恶劣天气等能见度较低的情况下,AEB 也同样会受到影响。

但相比这类因为「没看见」而未触发的情况,「看见了,但没触发」的情况更加复杂。
在不少 AEB 的测试中,我们已经见识过了各种成功刹停的案例。但不少测试都有一个共同点,那就是场景都「很标准」。
偌大的场景中,只有目标假车或是测试假人。可你也知道,这样舒适的路况,在市区开车基本是遇不到的。
然而路面上的物体,往往不是那么的常规,锥桶、路障、前车的掉落物、甚至是横在路面上的车、翻倒在路面上的车……这些静止或是异形物体,对 AEB 来说都是不小的难题。

为了避免误触发,静态物体有可能会被 AEB 忽略在外。毕竟如果墙体、路肩、行道树等等静态物体都识别为潜在的危险并加以制动,这车还真就不用开了。
但在遇到离墙体等静态物较近的障碍物时,AEB 也有将其识别为墙体的可能,并对真正的危险视而不见,酿成险情。
此外,对于以视觉算法为核心的 AEB,在遇到未被定义的物体时也难以做出反应,就更不用说做出制动操作了。
在交通情况较为复杂,障碍物较多的情况下,AEB 同样也会「看花了眼」,无法做出正确判断。而作为一个紧急功能,除非有足够的信息加以确认,否则 AEB 秉持「非必要不介入」的原则,自然也就不会有所反应了。
说到底,AEB 是防范事故的最后一张底牌。但打出底牌,通常已经是没有办法的办法,在有一手好牌的情况下,底牌还是用不上的好。
车企的愿景与现实的难题
实际上,如果你在视频网站上搜索诸如「主动刹车」、「紧急避让」等关键词,一定能够看到不少车辆在危险状况下的「神操作」,尽管不是 100% 成功避险,但每成功一次,就意义非凡。

而除了 AEB,自动紧急转向、车道保持系统等等一系列主动安全功能也在从多方面保护你的安全。
可以说,主动安全的加持,已经让不少车主躲过了大麻烦。
主动安全的尽头,是极低的事故率与自动驾驶,也是不少车企为消费者们勾勒的宏伟蓝图。
然而现实是,在目前,即便相关功能再高级,精度再细腻,主动安全的能力依旧有其边界,只要超出「理想情况」,系统就有随时摆烂的可能。
这会冲击不少用户对主动安全乃至辅助驾驶的信任,毕竟「买车的时候说得好听,看着原来也并不靠谱啊?」
对于车企来说,情况则更加尴尬。毕竟即便在较为理想的情况下,也无法 100% 保证系统不出现误检情况,更别提路面上还有不少肆无忌惮闯红灯、横冲直撞过路口的交通参与者了。
别忘了,在辅助驾驶从 L2 级转向 L3 之后,辅助驾驶的事故责任人,将会从驾驶员转变为车企。在进一步提升主动安全的能力之前,鲜有车企敢于真的开放 L3 级自动驾驶。(奔驰 L3 级自动驾驶的启用条件十分苛刻:封闭高速路+限速 60km/h)

说白了,在车辆主动安全能力与路面交通情况均不具备「让车自己开」的条件下,以驾驶者为核心的人机共驾,仍然是目前最为实际的选择。
毕竟机器的反应或许比人更快,但能判断某个小岔口有「小电驴」窜出的经验,只有你才有。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK