
1

landmark的添加残差块
source link: https://charon-cheung.github.io/2022/12/24/%E6%BF%80%E5%85%89SLAM/Cartographer/%E6%BA%90%E7%A0%81%E8%A7%A3%E8%AF%BB/landmark%E7%9A%84%E6%B7%BB%E5%8A%A0%E6%AE%8B%E5%B7%AE%E5%9D%97/#ComputeUnscaledError
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

landmark的添加残差块
problem->AddResidualBlock(
LandmarkCostFunction2D::CreateAutoDiffCostFunction(
observation, prev->data, next->data),
new ceres::HuberLoss(huber_scale),
prev_node_pose->data(), next_node_pose->data(),
C_landmarks->at(landmark_id).rotation(),
C_landmarks->at(landmark_id).translation() );
CreateAutoDiffCostFunction
static ceres::CostFunction* CreateAutoDiffCostFunction(
const LandmarkObservation& observation, const NodeSpec2D& prev_node,
const NodeSpec2D& next_node)
{
return new ceres::AutoDiffCostFunction<
LandmarkCostFunction2D,
6 /* residuals,operator() return的是6维向量 */,
// 所估计变量的维度
3 /* previous node pose variables (x,y,theta) */,
3 /* next node pose variables (x,y,theta) */,
4 /* landmark rotation variables */,
3 /* landmark translation variables */>(
new LandmarkCostFunction2D(observation, prev_node, next_node));
}
operator
template <typename T>
bool operator()(const T* const prev_node_pose, const T* const next_node_pose,
const T* const landmark_rotation,
const T* const landmark_translation,
T* const e) const
{
const std::tuple<std::array<T, 4>, std::array<T, 3>>
interpolated_rotation_and_translation = InterpolateNodes2D(
prev_node_pose, prev_node_gravity_alignment_, next_node_pose,
next_node_gravity_alignment_, interpolation_parameter_);
const std::array<T, 6> error = ScaleError(
ComputeUnscaledError(
landmark_to_tracking_transform_,
std::get<0>(interpolated_rotation_and_translation).data(),
std::get<1>(interpolated_rotation_and_translation).data(),
landmark_rotation, landmark_translation),
translation_weight_, rotation_weight_);
std::copy(std::begin(error), std::end(error), e);
return true;
}
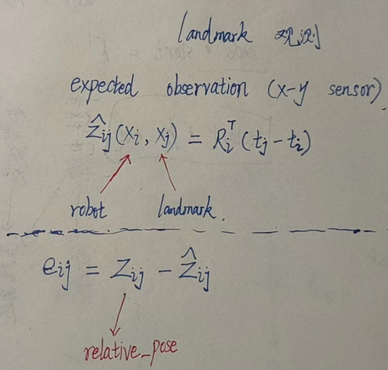
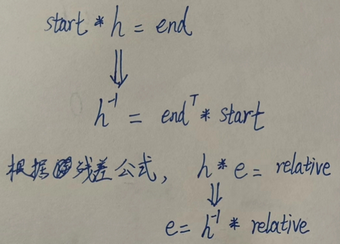
ComputeUnscaledError
template <typename T>
static std::array<T, 6> ComputeUnscaledError(
const transform::Rigid3d& relative_pose,
const T* const start_rotation, const T* const start_translation,
const T* const end_rotation, const T* const end_translation )
{
// 四元数共轭,在这里就是逆
const Eigen::Quaternion<T> R_i_inverse( start_rotation[0],
-start_rotation[1],
-start_rotation[2],
-start_rotation[3] );
// 平移的差
const Eigen::Matrix<T, 3, 1> delta(end_translation[0] - start_translation[0],
end_translation[1] - start_translation[1],
end_translation[2] - start_translation[2]);
const Eigen::Matrix<T, 3, 1> h_translation = R_i_inverse * delta;
const Eigen::Quaternion<T> h_rotation_inverse =
Eigen::Quaternion<T>(end_rotation[0], -end_rotation[1],
-end_rotation[2], -end_rotation[3]) *
Eigen::Quaternion<T>(start_rotation[0], start_rotation[1],
start_rotation[2], start_rotation[3]);
const Eigen::Matrix<T, 3, 1> angle_axis_difference =
transform::RotationQuaternionToAngleAxisVector(
h_rotation_inverse * relative_pose.rotation().cast<T>());
return { {T(relative_pose.translation().x()) - h_translation[0],
T(relative_pose.translation().y()) - h_translation[1],
T(relative_pose.translation().z()) - h_translation[2],
angle_axis_difference[0],
angle_axis_difference[1],
angle_axis_difference[2]} };
}
relative_pose 是 landmark_to_tracking_transform,landmark和tracking坐标系的相对位姿,在SensorBridge::HandleLandmarkMessage中获得
ScaleError一看就是残差乘以权重
template <typename T>
std::array<T, 3> ScaleError( const std::array<T, 3>& error,
double translation_weight,
double rotation_weight )
{
return {{
error[0] * translation_weight,
error[1] * translation_weight,
error[2] * rotation_weight
}};
}
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK