

充电一次可走15460步,还能边走边充,这个机械假腿连脚趾都能动 | Science Robotics封...
source link: https://www.qbitai.com/2022/11/39898.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

充电一次可走15460步,还能边走边充,这个机械假腿连脚趾都能动 | Science Robotics封面

3层BUFF:轻便、灵活、续航能力强
Alex 发自 凹非寺
量子位 | 公众号 QbitAI
来看一段“机械飞升”的视频:
小哥穿戴上一个机械假腿,气定神闲地走上楼梯,甚至还可以跨级。
下楼也完全没问题:

除了肉眼可见的灵活之外,它的续航能力也很出色——充电一次,就能走15460步。
也就是说,穿戴者如果不出门暴走的话,充一次电能用10天左右。(戴假肢的人平均一天走1500步)
另外,当人在平地上行走时,启动“被动模式”,连电都不用充就能走∞步。
现在,这个动力假肢还成了Science Robotics最新一期的封面主角。

之所以能这么灵活,一是因为这个动力假肢的仿生膝关节、踝关节、脚趾都可以动。
二是它比之前的同类轻巧不少,不然…连抬个腿都费劲。
那么,能同时叠满“轻便+灵活+续航能力强悍”3层BUFF,这个假肢到底是怎么造的?
能自发电的假腿
背后的研究团队来自美国犹他大学,他们主要从腿部的三处重要运动关节入手:
膝关节、踝关节、脚趾关节。
正常人在行走过程中,膝关节的扭矩(力和力臂之积)变化范围较大,比如膝关节在伸展时的扭矩可达屈腿时的4倍。
其实,动力假肢已经不是新鲜概念了,但它们搭载的动力装置往往很笨重。先前的动力系统,膝关节处的轴都比较长。
为了缓解设备重量体积与关节扭矩之间的矛盾,研究人员们想出了一个新思路:
在运动关节的矢状面(Sagittal Plain)上,分析生物力学原理,把要素搬到机械系统上。
这里说到的矢状面,就是把人体或器官、组织,分为左右两部分的解剖平面。
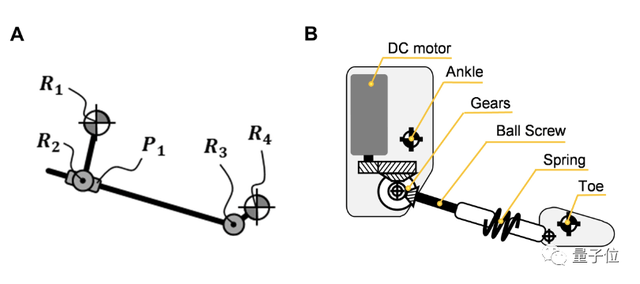
由此思路,他们在膝关节处,设计了一个独特的扭矩敏感驱动器 (Torque Sensitive Joint)。

这个驱动器是个被动可变的传动装置,不仅能连续快速地改变扭矩比,而且所需的电机扭矩和电流都相对大幅减少。
因此,仅用一个重量为170克的小型电机,就能在膝关节处提供足够大的扭矩,轴长还更短。
不过除了扭矩之外,膝关节的运动速度,也是影响仿生效果的重要因素。
所幸研究人员发现,膝关节的运动速度和扭矩不会同时达到峰值,所以这个小型电机也能提供足够的速度。

于是,在此扭矩敏感驱动器的加持下,膝关节的结构变得更紧凑,更轻巧,而且仿生效果也很奈斯~
除了膝关节外,仿生的踝关节和脚趾关节上也有不少“硬核”之处。
研究者发现,趾关节和踝关节的扭矩大小,几乎是成正比关系;而且这两个关节的速度大小相当、方向基本相反。
也就是说,当脚趾消耗动力时,脚踝会产生动力。
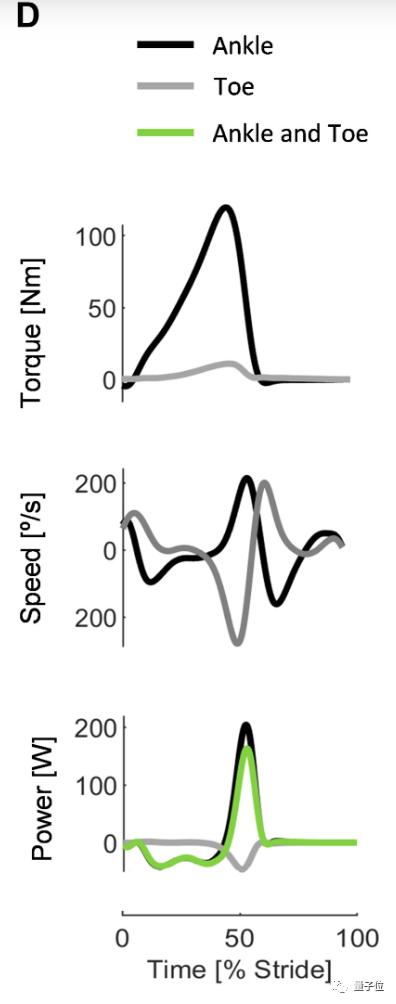
所以重点来了——
一个驱动器就能同时为脚踝和脚趾关节提供动力,而且还比用两个单独的驱动器需要更少的机械和电气元件。(顺便又变轻了)
这个同时给脚踝和脚趾提供动力的装置,名曰欠驱动系统,意思是其输入量比要控制的量少。
实测结果显示,仅给脚踝提供动力的话,每步所需电能为14.4J,总体效率为43.8%;而采用欠驱动设计,每步所需电能下降到8.2J,总体效率达到76.8%。
可见,这样还能“步步省电”。
研究人员推算,用这个假肢目前搭载的电池(2400毫安时),充一次电,就能在标准模式下走15460步。
而这,说的还是在要用电的标准模式。
在被动模式下,不仅不用电,还能反向充电:
系统可以把机械能转化为电能,平均每走一步就能给电池充电2.0±0.6J。

在被动模式下,膝关节主要表现为阻尼器,踝关节则主要像弹簧一样运动。这样虽然不如标准模式行动自然,但在平地行走也是绰绰有余了。
另外,还有一点创新之处:
在此模式下,膝关节和踝关节假体的机械运动,和在微处理器控制下的效果很像,但现有的其他电动假肢都没有这种功能。
到目前为止,已有三名膝上截肢者试戴了这种炫酷义肢。
结果表明,尽管他们的走路风格自成一派,但最终都能靠此独立行走,和正常人没有明显差别。
研究者认为,这个假肢的适用人群非常广泛:身高在160到191cm之间、净体重在59到91公斤的截肢患者都可以正常佩戴。
当然他们也表示,这个假肢仍有一些待改进之处。
例如,佩戴者不能单独控制脚踝和脚趾关节,二者扭矩之间的比例固定,不能根据用户的需要或偏好进行更改。
后续他们还会进行更多的实践,提高假肢的实用效果。
事实上,全世界的截肢人群可能比大伙儿想象的还多——
据央视报道,我国每年就约28万人因糖尿病被足截肢。

轻便好用假肢,无疑对这个庞大的群体意义非凡。
论文地址:
https://www.science.org/doi/10.1126/scirobotics.abo3996
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK