
7

Reading 3D Photography using Context-aware Layered Depth Inpainting
source link: https://jyzhu.top/Reading-3D-Photography-using-Context-aware-Layered-Depth-Inpainting/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

论文地址:https://shihmengli.github.io/3D-Photo-Inpainting
作者:Meng-Li Shih, Shih-Yang Su, Johannes Kopf, Jia-Bin Huang
发表: CVPR2020
链接: https://github.com/vt-vl-lab/3d-photo-inpainting
之前的照片3D化的方法,会在视角变动后出现的新像素区域 填充很模糊的背景;这个方法主要是用inpainting的方法提高新背景生成的效果
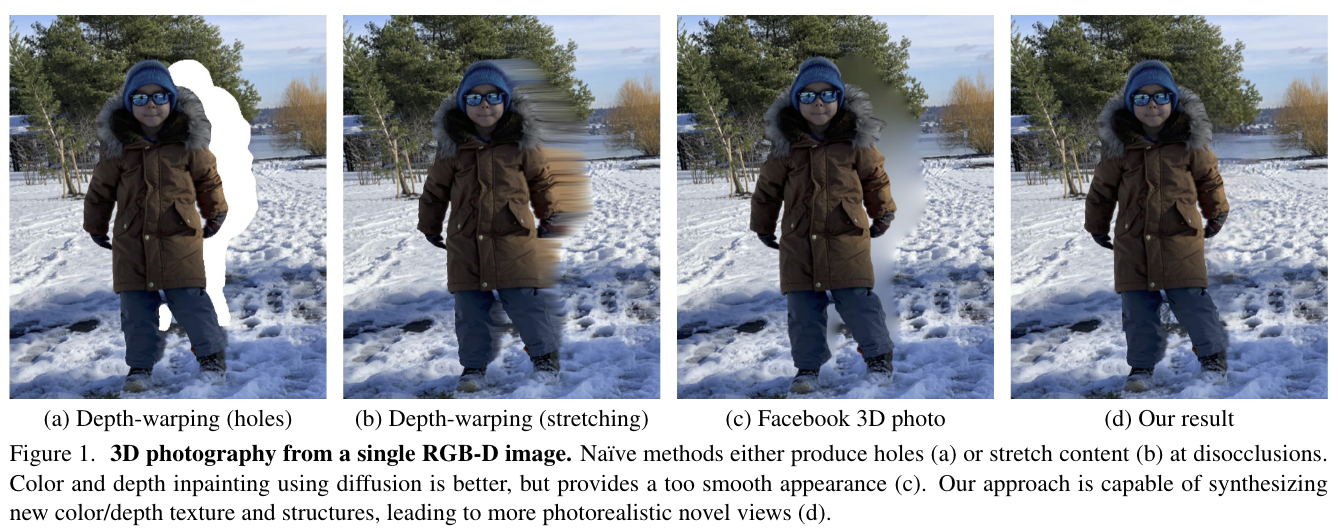
image-20221007084129382
What:
- 任务是3D photography,图像3D化,把一张2D+深度信息的RGB-D图像转化成3D风格的图像。
- 现在的多镜头智能手机拍的照片都能提供深度信息。没有的话,也能用其他模型预测深度。
- 用分层深度图像(Layered Depth Image)来表示图像:能显式地表示像素点之间的连通性。和普通的2D图像相比,可以把像素点分成多层来表示,同一个坐标处可以有重合的不同层次的像素点。
- 提出一个基于学习的 inpainting 方法填充重叠区域的像素,让3D图像视角变化的时候出现的新背景效果很好。
是一个很清晰的流程:
输入为单张RGB-D图像。D为depth,一般多镜头智能手机拍摄的照片都能提供深度信息;没有的话就用其他模型预测深度,比如MegaDepth, MiDas, and Kinect depth sensor
将输入图像转化成分层深度图像(Layered Depth Image)。LDI中的每个像素点保存颜色和深度信息,以及上下左右四个方向的邻居像素点。同一个坐标处可以有重合的不同深度的像素点。
图像预处理:检测深度不连贯的边缘
image-20221007090910332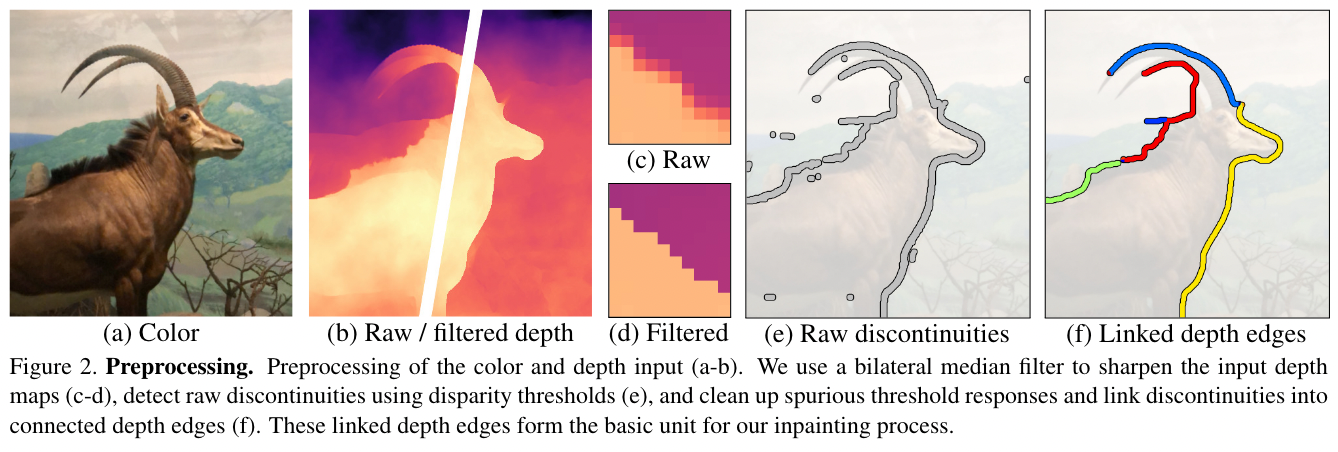
用filter把深度边缘过滤得更锐利,然后清理一些不连贯的边缘,最后根据连通性划分不同的深度边(如图2 (f)中,不同颜色表示不同深度边)。
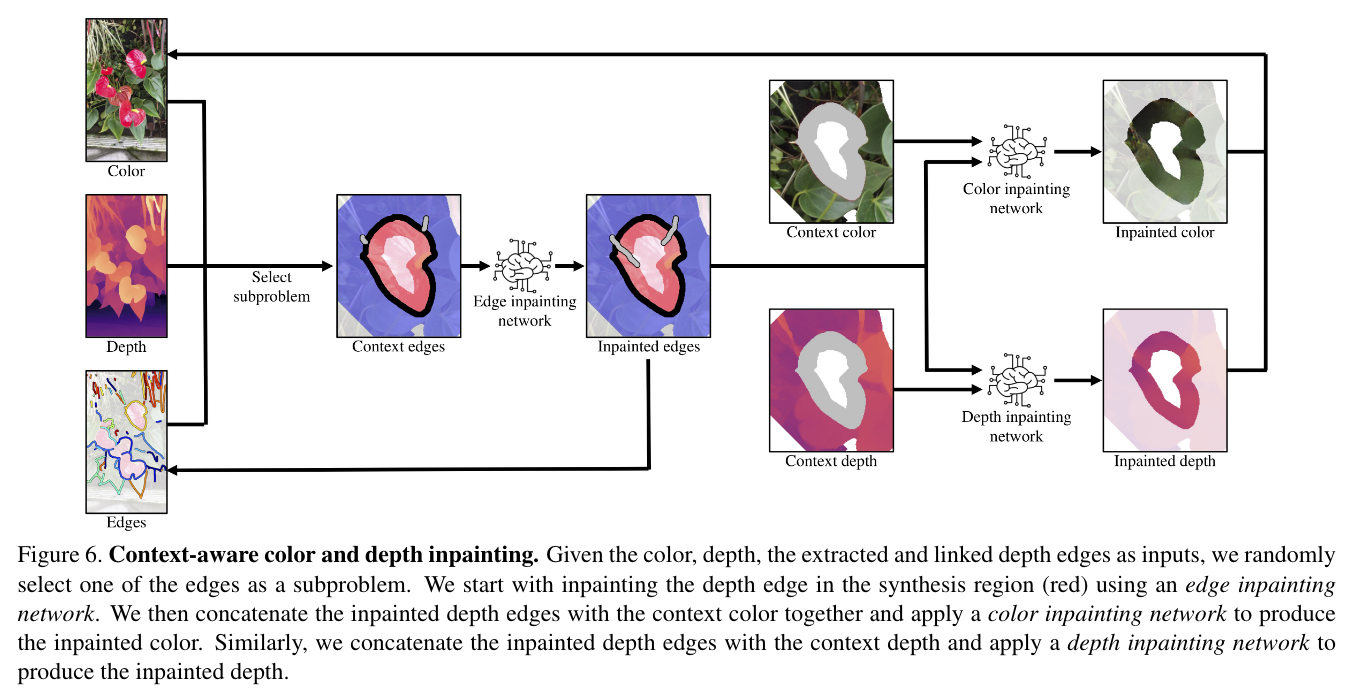
对于每一个深度边,把LDI图中的像素点切割开,并在背景层扩展一些像素点,对扩展区域进行生成
image-20221007091217942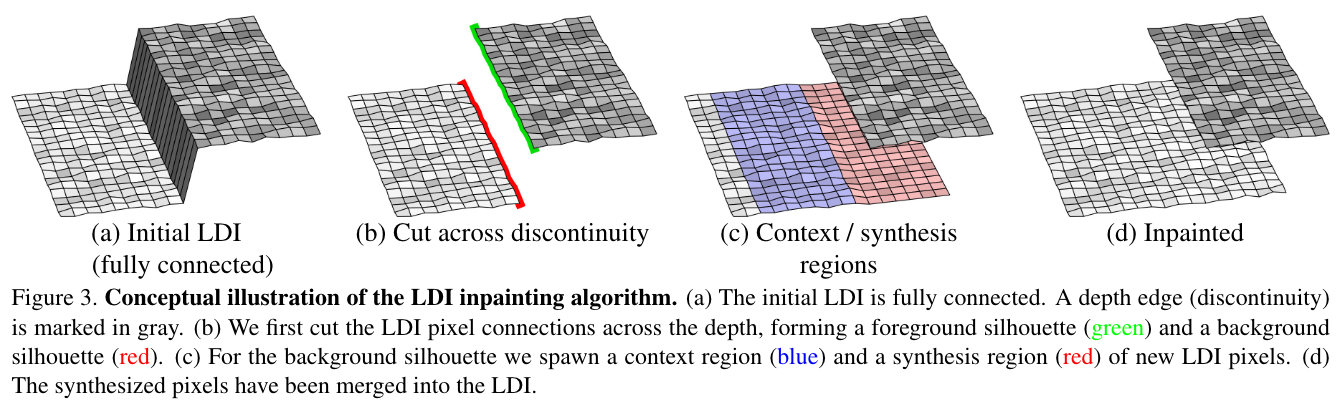
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK