

【图像处理笔记】图像分割之形态学分水岭 - 湾仔码农
source link: https://www.cnblogs.com/Fish0403/p/16774853.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

【图像处理笔记】图像分割之形态学分水岭
迄今为止,我们讨论了基于三个主要概念的分割:边缘检测、阈值处理和区域提取。每种方法都有优点[例如全局阈值处理具有速度优势]和缺点[例如在基于边缘的分割中,需要进行后处理(如边缘连接)]。本节讨论的基于形态学分水岭概念的方法。分水岭分割体现了其他三种方法的许多概念,因此往往会产生更稳定的分割结果,包括连通的分割边界。

分水岭方法是一种基于拓扑理论的数学形态学的分割方法,基本思想是把图像看作测地学上的拓扑地貌,将像素点的灰度值视为海拔高度,整个图像就像一张高低起伏的地形图。每个局部极小值及其影响区域称为集水盆,集水盆的边界则形成分水岭。算法的实现过程可以理解为洪水淹没的过程:最低点首先被淹没,然后水逐渐淹没整个山谷;水位升高到一定高度就会溢出,于是在溢出位置修建堤坝;不断提高水位,重复上述过程,直到所有的点全部被淹没;所建立的一系列堤坝就成为分隔各个盆地的分水岭。
分水岭的计算过程是一个迭代标注过程,通过寻找集水盆和分水岭对图像进行分割。经典的分水岭算法分为排序过程和淹没过程两个步骤,首先对每个像素的灰度级从低到高排序,然后在从低到高的淹没过程中,对每一个局部极小值在 h 阶高度的影响域进行判断及标注。
2 cv::watershed的使用
2.1 相关函数
OpenCV提供了函数watershed实现基于标记的分水岭算法。输入图像一般是原图,或者梯度图,由于噪声和梯度的局部不规则性会导致过度分割,控制过度分割的一种方法依据是标记。标记图像为CV_32S 类型,我们预先把一些区域标注好,图像中每个非零像素代表一个标签。对图像中部分像素做标记,表明它的所属区域是已知的。这些标注了的区域称之为种子点。watershed 算法会把这些标记的区域慢慢膨胀填充整个图像。
void watershed( InputArray image, // 输入8位3通道图像。
InputOutputArray markers //输入/输出标记的 32 位单通道图像(地图)。 与 image 具有相同的大小。
);
OpenCV中,函数distanceTransform()用于计算图像中每一个非零点像素与其最近的零点像素之间的距离,输出的是保存每一个非零点与最近零点的距离信息。图像上越亮的点,代表了离零点的距离越远。可以根据距离变换的这个性质,经过简单的运算,用于细化字符的轮廓和查找物体质心(中心)。
void distanceTransform( InputArray src, //输入图像,8-bit 单通道灰度图像
OutputArray dst, //保存了每一个点与最近的零点的距离信息,点越亮离零点越远。
int distanceType,//距离的类型
int maskSize, //距离变换遮罩的大小,通常取 3, 5
int dstType=CV_32F); //输出图像类型
2.2 标记的生成
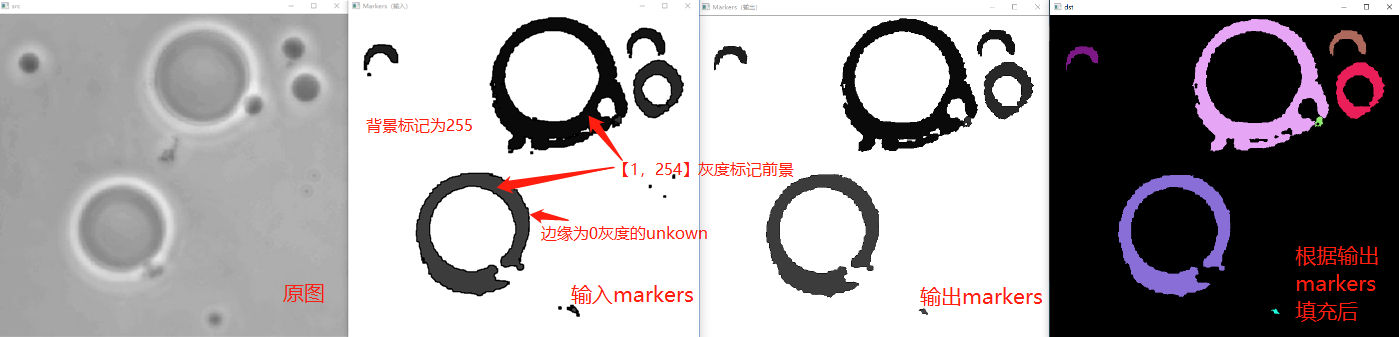
标记由3部分组成:确定前景、确定背景和未知区域。分为两步:
(1)通过 阈值分割+形态学【例1】,距离变换【例2】,鼠标交互等方法得到这三个区域。
(2)通过 connectedComponents【例1】或 drawContours【例2】标记区域,其中未知区域用0标记,其他区域用大于0的整数标记。
例1 阈值分割+形态学得到三区域→connectedComponents标记区域→分水岭
#include <opencv2/opencv.hpp>#include <iostream>using namespace cv;using namespace std;int main() {Mat src;Mat img = imread("./16.tif");cvtColor(img, src, COLOR_BGR2GRAY);imshow("src", src);// 阈值处理Mat thresh;threshold(src, thresh, 0, 255, THRESH_OTSU);<br>// 生成确定背景区域Mat background;Mat ele = getStructuringElement(MORPH_RECT, Size(3, 3));dilate(thresh, background, ele, cv::Point(-1, -1), 2);bitwise_not(background, background);// 生成确定前景区域,并利用连通区域标记Mat foreground;morphologyEx(thresh, foreground, MORPH_OPEN, ele, cv::Point(-1, -1), 2);int n = connectedComponents(foreground, foreground, 8, CV_32S);// 此时确定前景大于0,其余为0// 生成标记图Mat markers = foreground;markers.setTo(255, background);// 将确定背景设为255,其余为0的不动,即为unkownMat markers8u;markers.convertTo(markers8u, CV_8U, 10);//灰度值*10使得差异变得明显imshow("Markers(输入)", markers8u);// 分水岭算法标注目标的轮廓watershed(img, markers);// 轮廓由-1表示markers.convertTo(markers8u, CV_8U, 10);//灰度值*10使得差异变得明显imshow("Markers(输出)", markers8u);// 后处理(颜色填充)Mat mark;markers.convertTo(mark, CV_8U);//转换后-1变成0bitwise_not(mark, mark);vector<Vec3b> colors;for (size_t i = 0; i < n; i++){int b = theRNG().uniform(0, 256);int g = theRNG().uniform(0, 256);int r = theRNG().uniform(0, 256);colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));}Mat dst = Mat::zeros(markers.size(), CV_8UC3);for (int i = 0; i < markers.rows; i++){for (int j = 0; j < markers.cols; j++){int index = markers.at<int>(i, j);if (index > 0 && index <= static_cast<int>(n))dst.at<Vec3b>(i, j) = colors[index - 1];}}imshow("dst", dst);waitKey(0);return 0;} |
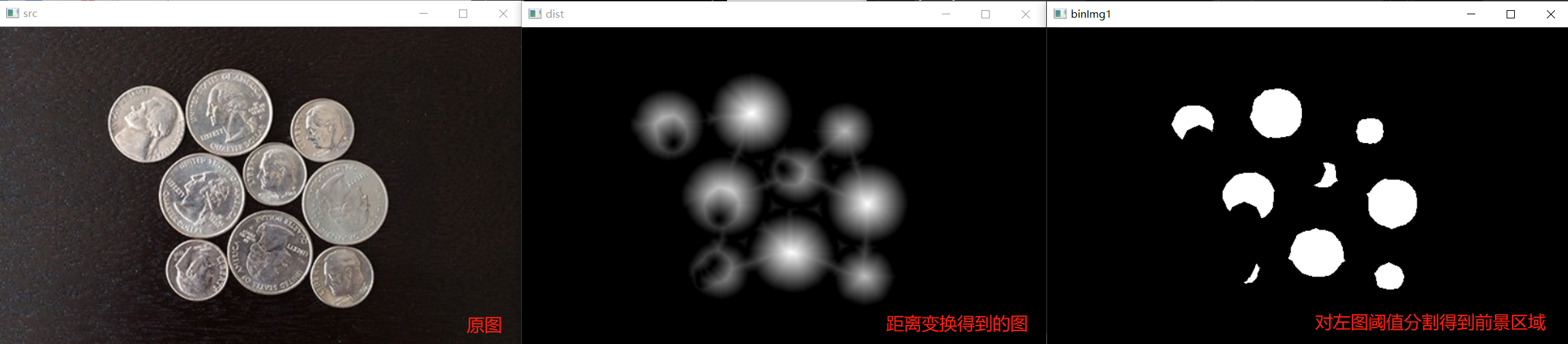
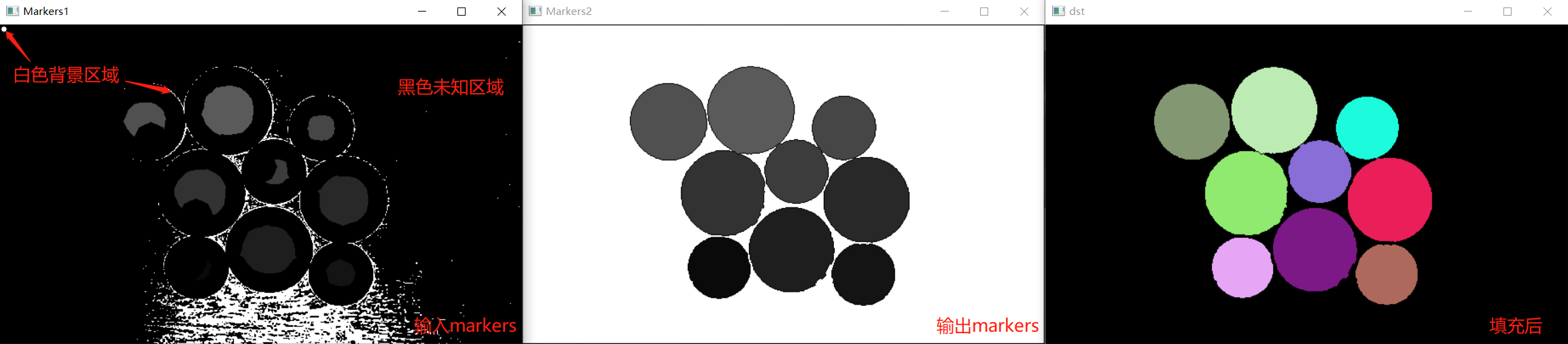
例2 梯度+距离变换得到三区域→drawContours标记区域→分水岭
分水岭分割的主要应用之一是,从背景中提取出接近一致的(团状)目标。由变化较小的灰度表征区域有较小的梯度之。因此,在实践中,我们常常看到分水岭分割应用到梯度图像,而不是应用到图像本身。在这一表述中,汇水盆地的区域极小值与对应感兴趣目标的梯度的极小值密切相关。
#include <opencv2/opencv.hpp>using namespace cv; using namespace std;int main() {Mat src_bgr = imread("./18.png");imshow("src", src_bgr);Mat mask, src_gray;cvtColor(src_bgr, src_gray, COLOR_BGR2GRAY);// 1.梯度+距离变换得到前景区域Mat blurImg;blur(src_gray, blurImg, Size(7, 7));Mat gx, gy, gxy;Sobel(blurImg, gx, CV_16S, 1, 0, 3);Sobel(blurImg, gy, CV_16S, 0, 1, 3);convertScaleAbs(gx, gx);convertScaleAbs(gy, gy);gxy = gx + gy;Mat binImg;threshold(gxy, binImg, 110, 255, THRESH_BINARY);Mat ele = getStructuringElement(MORPH_RECT, Size(3, 3));morphologyEx(binImg, binImg, MORPH_OPEN, ele);morphologyEx(binImg, binImg, MORPH_CLOSE, ele);floodFill(binImg, Point(0, 0), Scalar(255));bitwise_not(binImg, binImg);Mat dist, binImg1;distanceTransform(binImg, dist, DIST_L2, 3);normalize(dist, dist, 0, 1.0, NORM_MINMAX);imshow("dist", dist);threshold(dist, binImg1, 0.4, 1.0, THRESH_BINARY);binImg1.convertTo(binImg1, CV_8U, 255);imshow("binImg1", binImg1);// 2.确定背景区域Mat markers = Mat::zeros(binImg1.size(), CV_32S);circle(markers, Point(5, 5), 3, Scalar(255), -1);inRange(src_gray, Scalar(0), Scalar(15), mask);// 3.生成标记图vector<vector<Point>> contours;findContours(binImg1, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);for (size_t i = 0; i < contours.size(); i++){drawContours(markers, contours, static_cast<int>(i), Scalar(static_cast<int>(i) + 1), -1);}markers.setTo(255, mask);Mat markers8u;markers.convertTo(markers8u, CV_8U, 10);imshow("Markers1", markers8u);// 4.分水岭watershed(src_bgr, markers);// 5.后处理Mat mark;markers.convertTo(mark, CV_8U);bitwise_not(mark, mark);markers.convertTo(markers8u, CV_8U, 10);imshow("Markers2", markers8u);vector<Vec3b> colors;for (size_t i = 0; i < contours.size(); i++){int b = theRNG().uniform(0, 256);int g = theRNG().uniform(0, 256);int r = theRNG().uniform(0, 256);colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));}Mat dst = Mat::zeros(markers.size(), CV_8UC3);for (int i = 0; i < markers.rows; i++){for (int j = 0; j < markers.cols; j++){int index = markers.at<int>(i, j);if (index > 0 && index <= static_cast<int>(contours.size()))dst.at<Vec3b>(i, j) = colors[index - 1];}}imshow("dst", dst);waitKey(0);return 0;} |
3 watershed源码
3.1 大致流程
1. 对输入的标记图mask的边界(1像素)置为-1,即边界不处理
2. 初始阶段:遍历mask中所有点,将标记为0且四邻域中有标记大于0的点(也就是标记点外面的一圈点)进队。有256个队列,进哪个队列呢?分两种情况:(1)四邻域中只有一个标记大于0的点,计算该点和这个邻域点的梯度(差值),若梯度为250,就进第250个队列。由于输入的原图是三通道的,算梯度要算三个通道的梯度,选最大的;(2)四邻域中不止一个标记大于0的点,选择梯度最小的点进队。
3. 经过上一步,得到256个队列,有些队列是空的,有些不是。定位到第一个非空的队列,遍历队列中的点。比较这个点的四邻域,分三种情况:(1)四邻域中有一个以上的邻域标记大于0(且它们标记不同),该点为分水岭;(2)四邻域中只有一个邻域标记大于0,那该点和这个邻域点标记相同,即被这个邻域点扩充(3)邻域中没有大于0的标记点,这是不可能的。因为标记点要么是初始种子点,要么是初始阶段延伸的种子点的邻接点,即该点一定存在一个邻接点是标记点
4. 在上一步中,情况(1)的分水岭点被pop出队列,且在mask中被标记为-1;情况(2)的点为新标记点,被pop出队列,同时查看其四邻域点,有没有没处理的点。没处理的点被push进队列(相当于又往外一圈),进哪个队列呢?和上面一样,根据梯度t。再次进入第3步,直到所有队列为空。有所不同的是,初始阶段从第0个队列开始找非空队列,而之后从min(t, active_queue)开始。也就是说,如果第二圈的点梯度都很大,就从第active_queue开始找非空队列。如果第二圈的梯度都很小,那就从最小的梯队开始找非空队列。
3.2 源码注解
注解来自OpenCV 源码中分水岭算法 watershed 函数源码注解,对比OpenCV 2.4.9,OpenCV 4.5中Mat取代了CvMat,cv::Mat是一个类(Class),而CvMat是一个Struct,获取元素的写法不同,如下:
Mat test = (Mat_<int>(3, 3) << 1, 2, 3, 4, 5, 6, 7, 8, 9 );int* p = test.ptr<int>();//获取元素的写法不同,之前是test->data.iint istep = test.step/sizeof(int);// 步长 = 一行字节数 / sizeof(像素数据类型)for (int i = 0; i < test.rows; i++) {// 逐行扫描for (int j = 0; j < test.rows; j++) {// 逐列扫描if (p[j] == 5) {//四邻域cout << p[j-1] << endl;//左cout << p[j+1] << endl;//右cout << p[j-istep] << endl;//上cout << p[j+istep] << endl;//下}}p += istep;} |
源码注解
#include "precomp.hpp"// 结点,用于存储原始图img中像素的偏移量和输出图mask中像素的偏移量typedef struct CvWSNode{struct CvWSNode* next;int mask_ofs;int img_ofs;}CvWSNode;// 队列,用于存储结点 CvWSNodetypedef struct CvWSQueue{CvWSNode* first;CvWSNode* last;}CvWSQueue;// 分配空间static CvWSNode*icvAllocWSNodes( CvMemStorage* storage ){CvWSNode* n = 0;int i, count = (storage->block_size - sizeof(CvMemBlock))/sizeof(*n) - 1;n = (CvWSNode*)cvMemStorageAlloc( storage, count*sizeof(*n) );for( i = 0; i < count-1; i++ )n[i].next = n + i + 1;n[count-1].next = 0;return n;}CV_IMPL voidcvWatershed( const CvArr* srcarr, CvArr* dstarr ){const int IN_QUEUE = -2; // 加入到队列q中的点定义为 -2const int WSHED = -1; // “分水岭”在mask中定义为 -1 const int NQ = 256; // 队列的数量 256,其实是对应灰度的数量cv::Ptr<CvMemStorage> storage;CvMat sstub, *src;CvMat dstub, *dst;CvSize size;CvWSNode* free_node = 0, *node;CvWSQueue q[NQ]; // 长度为256的CvWSQueue数组,注意数组中每个元素都是一个队列,队列中每个元素是一个节点int active_queue; // 指明当前处理的队列,q[active_queue]int i, j;int db, dg, dr;int* mask; // 指向标记图像的指针uchar* img; // 指向原始图像的指针int mstep, istep; // mstep是mask对应的一行像素数(不是字节数),istep是img对应的一行像素数int subs_tab[513];// MAX(a,b) = b + MAX(a-b,0) 取最大值#define ws_max(a,b) ((b) + subs_tab[(a)-(b)+NQ])// MIN(a,b) = a - MAX(a-b,0) 取最小值#define ws_min(a,b) ((a) - subs_tab[(a)-(b)+NQ])// 进队操作#define ws_push(idx,mofs,iofs) \{ \if( !free_node ) \free_node = icvAllocWSNodes( storage );\node = free_node; \free_node = free_node->next;\node->next = 0; \node->mask_ofs = mofs; \node->img_ofs = iofs; \if( q[idx].last ) \q[idx].last->next=node; \else \q[idx].first = node; \q[idx].last = node; \}// 出队操作#define ws_pop(idx,mofs,iofs) \{ \node = q[idx].first; \q[idx].first = node->next; \if( !node->next ) \q[idx].last = 0; \node->next = free_node; \free_node = node; \mofs = node->mask_ofs; \iofs = node->img_ofs; \}// 求出 ptr1 和 ptr2 指向的像素 r,g,b 差值的最大值#define c_diff(ptr1,ptr2,diff) \{ \db = abs((ptr1)[0] - (ptr2)[0]);\dg = abs((ptr1)[1] - (ptr2)[1]);\dr = abs((ptr1)[2] - (ptr2)[2]);\diff = ws_max(db,dg); \diff = ws_max(diff,dr); \assert( 0 <= diff && diff <= 255 ); \}src = cvGetMat( srcarr, &sstub );dst = cvGetMat( dstarr, &dstub );// 对参数做检查,要求图像src的类型是8UC3,dst的类型是32SC1,src和dst size相同if( CV_MAT_TYPE(src->type) != CV_8UC3 )CV_Error( CV_StsUnsupportedFormat, "Only 8-bit, 3-channel input images are supported" );if( CV_MAT_TYPE(dst->type) != CV_32SC1 )CV_Error( CV_StsUnsupportedFormat,"Only 32-bit, 1-channel output images are supported" );if( !CV_ARE_SIZES_EQ( src, dst ))CV_Error( CV_StsUnmatchedSizes, "The input and output images must have the same size" );size = cvGetMatSize(src); // 获取图像的sizestorage = cvCreateMemStorage();// 步长 = 一行字节数 / sizeof(像素数据类型)istep = src->step; // img是uchar型, sizeof(uchar) = 1,所以忽略除数 img = src->data.ptr; // 获取 uchar类型指针mstep = dst->step / sizeof(mask[0]); // mask是int(32SC1)型,sizeof(mask[0]) = 4mask = dst->data.i; // 获取 int类型指针memset( q, 0, NQ*sizeof(q[0]) ); // 初始化队列qfor( i = 0; i < 256; i++ )subs_tab[i] = 0;for( i = 256; i <= 512; i++ )subs_tab[i] = i - 256;// draw a pixel-wide border of dummy "watershed" (i.e. boundary) pixels// 把图像四个边的像素画成分水岭// mask的首行和末行画成分水岭for( j = 0; j < size.width; j++ )mask[j] = mask[j + mstep*(size.height-1)] = WSHED;// initial phase: put all the neighbor pixels of each marker to the ordered queue -// determine the initial boundaries of the basins// 初始阶段:把每个标记的所有邻居像素放到有序队列中去,以确定聚水盆的初始边界// 即每个标记(种子,全为正值,1,2,3...)都是一个初始聚水盆,标记的周围一圈的邻居像素就是聚水盆的初始边界// 这里用的是一种逆向思维,不是找标记点,而是判断每一个点是否为标记点的邻居,若是,则该点也被扩充为与标记点同类型的标记点// 若是多个标记点的邻居,选择梯度最小的标记点的类型,作为该点的标记点类型for( i = 1; i < size.height-1; i++ ){img += istep; mask += mstep; // 逐行扫描mask[0] = mask[size.width-1] = WSHED; // 每一行的首列和末列画成分水岭,加上前面的首行和末行,mask被分水岭方框围起来for( j = 1; j < size.width-1; j++ ) // 逐列{int* m = mask + j; // mask的每个像素if( m[0] < 0 ) m[0] = 0; // 该点若为负值,先置为零(初始状态下除了四边是分水岭(-1)其余点不应该存在负值?)if( m[0] == 0 && (m[-1] > 0 || m[1] > 0 || m[-mstep] > 0 || m[mstep] > 0) ) // 若该点为非标记点(0),且四邻域存在标记点(>0){// 求出原图中该点到有标记点的四邻域中,梯度值最小(idx)方向的点,将该点和对应的最小梯度值放入q[idex]队列中// 两个像素的r,g,b 三个通道中相差最大的值作为像素间的梯度值uchar* ptr = img + j*3;int idx = 256, t;if( m[-1] > 0 ) c_diff( ptr, ptr - 3, idx );if( m[1] > 0 ){c_diff( ptr, ptr + 3, t );idx = ws_min( idx, t );}if( m[-mstep] > 0 ){c_diff( ptr, ptr - istep, t );idx = ws_min( idx, t );}if( m[mstep] > 0 ){c_diff( ptr, ptr + istep, t );idx = ws_min( idx, t );}assert( 0 <= idx && idx <= 255 );ws_push( idx, i*mstep + j, i*istep + j*3 ); // 将该点在img和mask中的坐标(一维表示)存储在q[idx]队列中m[0] = IN_QUEUE; // 在mask中标记该点已入队}}}// find the first non-empty queue// 定位到第一个非空的队列for( i = 0; i < NQ; i++ )if( q[i].first )break;// if there is no markers, exit immediately// 若i=256,说明数组q中所有队列为空if( i == NQ )return;active_queue = i;img = src->data.ptr;mask = dst->data.i;// recursively fill the basins// 递归地填满聚水盆for(;;){int mofs, iofs; // 将二维图像线性化后图像像素的坐标 mask_offset 和 img_offset 的缩写int lab = 0, t;int* m;uchar* ptr;// 如果这个灰度上的队列处理完了,就继续找下一个非空队列if( q[active_queue].first == 0 ){for( i = active_queue+1; i < NQ; i++ )if( q[i].first )break;if( i == NQ )break;active_queue = i;}ws_pop( active_queue, mofs, iofs ); // 从q[active_queue]队列中取出一个结点数据// 找到这个结点记录的img和mask中的像素点,比较该点在mask中的邻居点// 邻居点中如果有标记点:该点与邻居点的标记类型不同,则该点为分水岭;该点与邻居点标记类型相同,则该点不变// 如果有非标记点:将非标记点扩充为标记点m = mask + mofs;ptr = img + iofs;t = m[-1];if( t > 0 ) lab = t;t = m[1];if( t > 0 ){if( lab == 0 ) lab = t;else if( t != lab ) lab = WSHED; // 如果该像素点的标记类型和邻居像素标记类型都 > 0 且不同,则为分水岭}t = m[-mstep];if( t > 0 ){if( lab == 0 ) lab = t;else if( t != lab ) lab = WSHED;}t = m[mstep];if( t > 0 ){if( lab == 0 ) lab = t;else if( t != lab ) lab = WSHED;}// 因为标记点要么是初始种子点,要么是初始阶段延伸的种子点的邻接点// 该点一定存在一个邻接点是标记点,所以lab一定会赋值一次,不为 0assert( lab != 0 ); // 若lab > 0 ,则该点被周围的标记点扩充;若lab = -1(WSHED),则该点定义为分水岭,继续下一个循环 m[0] = lab; if( lab == WSHED )continue;// lab > 0 的情况,确定该点为标记点,且邻居点中存在未标记点的情况,将未标记点扩充为标记点if( m[-1] == 0 ){c_diff( ptr, ptr - 3, t ); // 计算梯度tws_push( t, mofs - 1, iofs - 3 ); // 将m[-1]这一未标记的点扩充为标记点,进队active_queue = ws_min( active_queue, t ); // 判断,若t < 当前处理的队列active_queue值,则下一次循环中处理q[t]队列,否则继续处理当前队列m[-1] = IN_QUEUE;}if( m[1] == 0 ){c_diff( ptr, ptr + 3, t );ws_push( t, mofs + 1, iofs + 3 );active_queue = ws_min( active_queue, t );m[1] = IN_QUEUE;}if( m[-mstep] == 0 ){c_diff( ptr, ptr - istep, t );ws_push( t, mofs - mstep, iofs - istep );active_queue = ws_min( active_queue, t );m[-mstep] = IN_QUEUE;}if( m[mstep] == 0 ){c_diff( ptr, ptr + istep, t );ws_push( t, mofs + mstep, iofs + istep );active_queue = ws_min( active_queue, t );m[mstep] = IN_QUEUE;}}}void cv::watershed( InputArray _src, InputOutputArray markers ){Mat src = _src.getMat();CvMat c_src = _src.getMat(), c_markers = markers.getMat();cvWatershed( &c_src, &c_markers );} |
1. 冈萨雷斯《数字图像处理(第四版)》Chapter 10(所有图片可在链接中下载)
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK