
3

将ROS的功能包打包为deb文件,并且成功安装
source link: https://blog.csdn.net/gwplovekimi/article/details/107370558
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

首先对要打包的功能包的CMakeLists.txt文件添加:
然后cm一下
运行下面命令安装bloom-generate
sudo apt-get install python-bloom fakeroot然后roscd切换到功能包并运行
bloom-generate rosdebian --os-name ubuntu --ros-distro melodic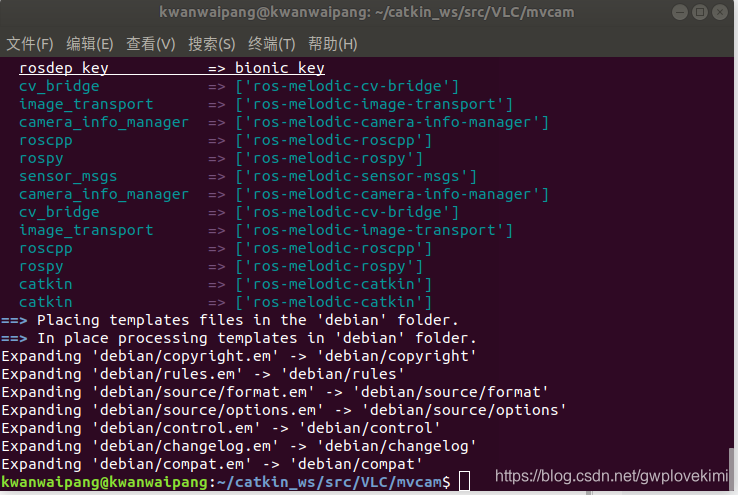
fakeroot debian/rules binary
就可以获得安装包
接下来测试一下
先运行主节点,然后我们来看看这个包运行的结果
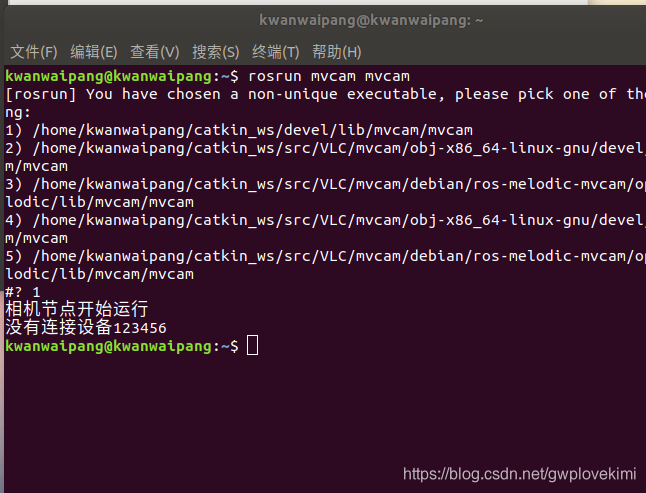
可以看到有很多包,选一个,显示123456注意跟后面对比
然后我们把这个包改一下,再cm,run一下
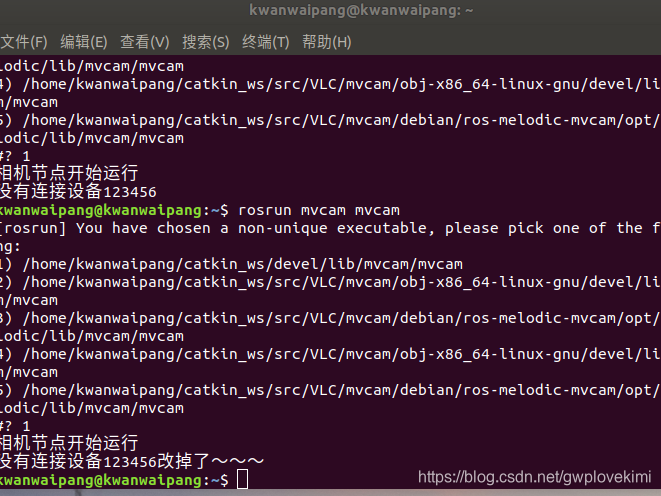
显示改掉了。然后我们把这个包拉走
再运行一次
虽然包没了,但之前cm建立了还可以用,那我们把下面这句注释掉
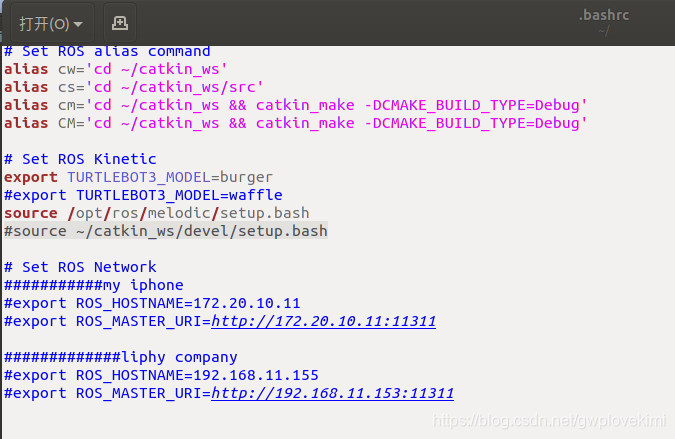
这样再run就找不到了
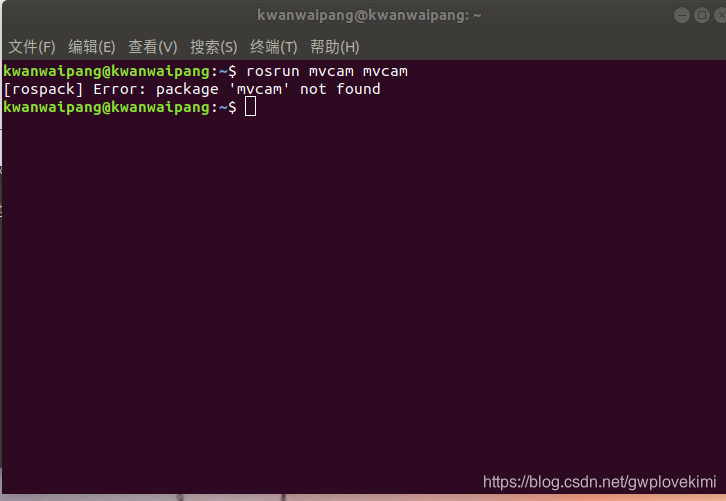
然后我们安装我们的包
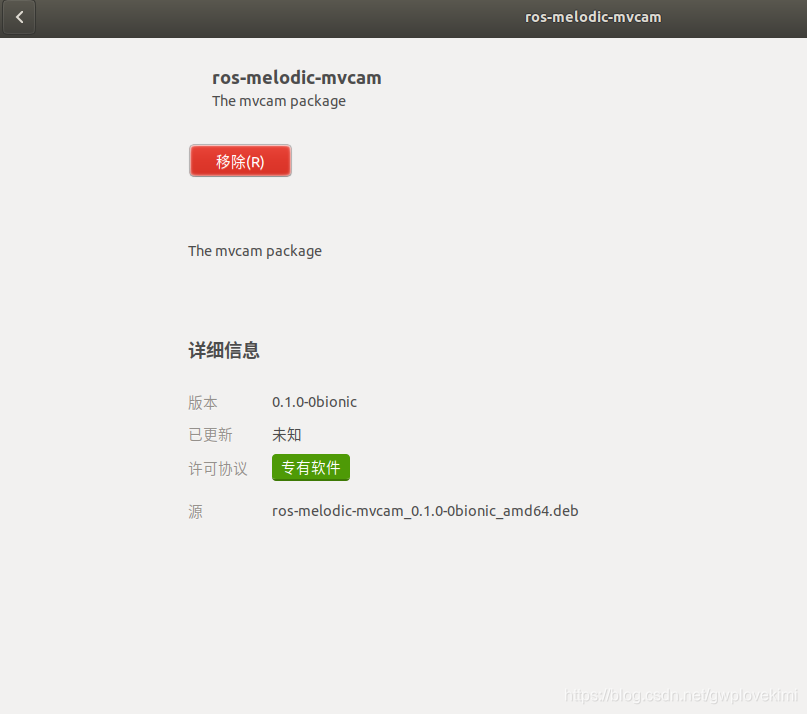
至此,成功安装功能包~~~。
删除安装包的命令
sudo dpkg -r ros-melodic-mvcamhttp://carlzhang.club/2018/10/21/generate-ros1-debian-package/
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK