

图的最短路径问题 详细分解版 - 小呆瓜瓜
source link: https://www.cnblogs.com/xiaodaiguagua/p/16364893.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

图的最短路径问题 详细分解版
1.图的最短路径问题分类
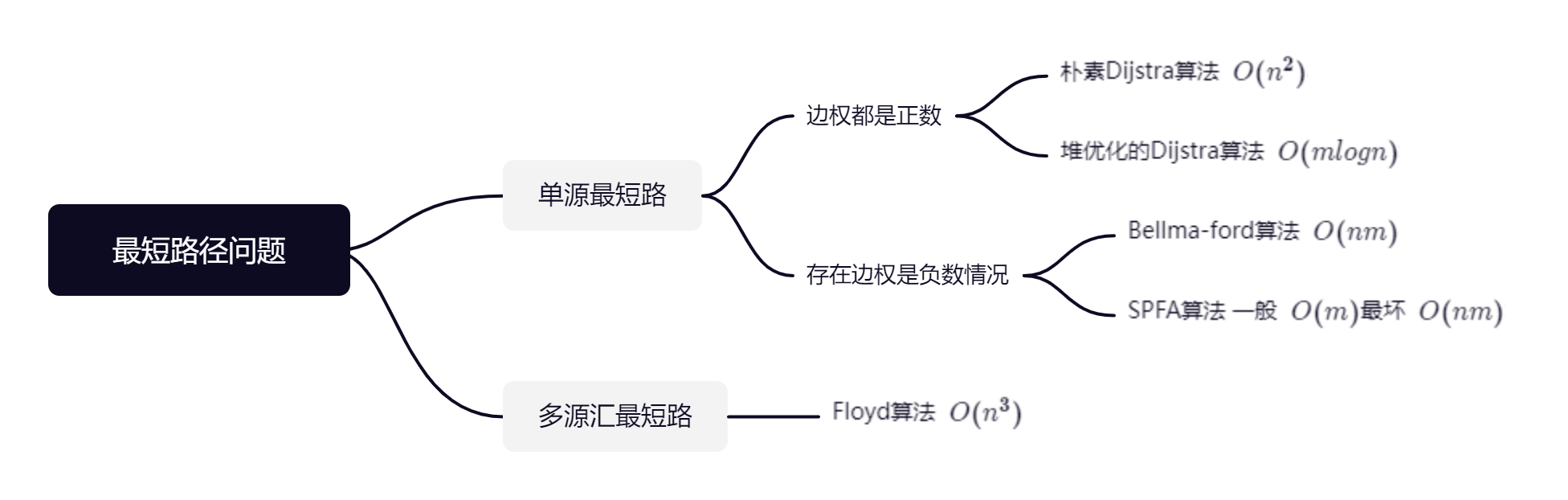
2.单源最短路问题
2.1边权值都是正数情况
2.1.1 朴素Dijstra算法
算法思想:每次从未被确定最短距离的结点中找出距离起点最小值的结点,加入集合s中,并用该结点更新其他未被确定最短路径值得结点路径。直到最终全部节点的最短路径值都计算出,此时集合s为所有结点集合。
#include<bits/stdc++.h>
using namespace std;
const int N = 510;
int g[N][N];//稠密图,邻接矩阵存储
int st[N];//是否被访问过,即是否在s集合中
int dist[N];//记录每个点到起点的距离
int n,m;
//返回编号为n的结点到1号结点的最短路径
int dijstra(){
memset(dist,0x3f,sizeof dist);//将距离初始化为无穷大
dist[1]=0;//1号结点距离初始化为0
for(int i=0;i<n;i++){//n轮循环,每次找出一个结点,加入s集合,并用其更新其他节点dist数组。必须有n轮循环,因为要更新dist数组
int t=-1;
for(int j=1;j<=n;j++){//循环找出当前距离起始的1号结点最近,且未加入s的结点
if(!st[j]&&(t==-1||dist[j]<dist[t])){
t=j;
}
}
st[t]=true;//将该结点加入s数组
for(int j=1;j<=n;j++){//循环更新其他节点距离
if(!st[j]){
dist[j]=min(dist[j],dist[t]+g[t][j]);
}
}
}
if(dist[n]==0x3f3f3f3f) return -1;//如果dist[n]未被更新,说明其不可达
return dist[n];
}
int main(){
memset(g,0x3f,sizeof g);//初始化结点间的距离为无穷大
cin>>n>>m;//输入数据包含n个结点,m条边
int a,b,c;
while(m--){
cin>>a>>b>>c;//输入m条边,输入数据存在自环和重边,取最小值即可
g[a][b]=min(g[a][b],c);
}
cout<<dijstra()<<endl;
return 0;
}
算法分析:算法包含两轮循环,时间复杂度为O(n2)O(n2)
2.1.2 堆优化的Dijstra算法
优化思想:朴素Dijstra算法每次都要找出当前距离起点最近的结点,加入集合s中。我们可以使用堆来维护结点距离起点的距离,省去一重循环。
//稀疏图的dijstra
#include<bits/stdc++.h>
using namespace std;
const int N = 1.5e5+10;
int e[N],ne[N],w[N],h[N],idx;//稀疏图,采用邻接表存储
int n,m;//n个结点,m条边
int dist[N];//距离数组
bool st[N];//是否访问过,即s集合标记
typedef pair<int, int> PII;//使用堆自动排序,pair的first为距离,second为编号
void add(int a,int b,int c){//添加结点a->b的边,权值为c
e[idx]=b;
w[idx]=c;
ne[idx]=h[a];
h[a]=idx++;
}
int dijstra(){
memset(dist,0x3f,sizeof dist);
dist[1]=0;
priority_queue<PII,vector<PII>,greater<PII>> q;//声明小根堆
q.push({0,1});//1号结点加入队列
while(!q.empty()){
PII t=q.top();
q.pop();
int distance=t.first,x=t.second;
if(st[x]) continue;//距离已经确定,跳过
st[x]=true;
for(int i=h[x];i!=-1;i=ne[i]){
int j=e[i];
if(dist[x]+w[i]<dist[j]){
dist[j]=dist[x]+w[i];
q.push({dist[j],j});
}
}
}
if(dist[n]==0x3f3f3f3f) return -1;
return dist[n];
}
int main(){
cin>>n>>m;
int a,b,c;
memset(h,-1,sizeof h);
while(m--){
cin>>a>>b>>c;
add(a,b,c);
}
cout<<dijstra()<<endl;
return 0;
}
算法分析:
时间复杂度:每次找到最小距离的点沿着边更新其他的点,若dist[j] > distance + w[i],表示可以更新dist[j],更新后再把j点和对应的距离放入小根堆中。由于点的个数是n,边的个数是m,在极限情况下(稠密图m=n∗n(n−1)2m=n∗n(n−1)2)最多可以更新m回,每一回最多可以更新n2n2个点(严格上是n - 1个点),有m回,因此最多可以把n2n2个点放入到小根堆中,因此每一次更新小根堆排序的情况是O(log(n2))O(log(n2)),一共最多m次更新,因此总的时间复杂度上限是O(mlog((n2)))=O(2mlogn)=O(mlogn)O(mlog((n2)))=O(2mlogn)=O(mlogn)
疑问:为什么会存在距离已经确定了点在堆中?
因为可能上次新加入集合s的元素更新了a的距离值,但是距离值很大,直到a的距离值确定了才pop出来。
2.2边权值存在负数的情况
2.2.1 Bellman-ford算法
算法思想:如果图中存在n个点,那么经过n-1次循环,每轮循环时把每条边都进行松弛操作,若在 n-1 次松弛后还能更新,则说明图中有负环,因此无法得出结果,否则就完成。
松弛操作:
for n次
for 所有边 a,b,w (松弛操作)
dist[b] = min(dist[b],back[a] + w)
注意:back[] 数组是上一次迭代后 dist[] 数组的备份,由于是每个点同时向外出发,因此需要对 dist[] 数组进行备份,若不进行备份会因此发生串联效应,影响到下一个点。
在下面代码中,是否能到达n号点的判断中需要进行if(dist[n] > INF/2)判断,而并非是if(dist[n] == INF)判断,原因是INF是一个确定的值,并非真正的无穷大,会随着其他数值而受到影响,dist[n]大于某个与INF相同数量级的数即可。
bellman - ford算法擅长解决有边数限制的最短路问题。
//本代码是解决有边数限制的最短路径问题的代码
#include<bits/stdc++.h>
using namespace std;
const int N = 10010;
int n,m,k;
int dist[510],backup[510];
struct{
int a,b,w;
}edges[N];//a->b有一条边,权重为w
int bellman_ford(){
memset(dist,0x3f,sizeof dist);
dist[1]=0;
for(int i=0;i<k;i++){//最多k条边,总共最对经过k条边
memcpy(backup,dist,sizeof dist);
for(int j=0;j<m;j++){//对所有的m条边执行松弛操作
int a=edges[j].a,b=edges[j].b,w=edges[j].w;
if(backup[a]+w<dist[b]){
dist[b]=backup[a]+w;
}
}
}
if(dist[n]>0x3f3f3f3f/2) return -0x3f3f3f3f;
else return dist[n];
}
int main(){
cin>>n>>m>>k;
int a,b,w;
for(int i=0;i<m;i++){
cin>>a>>b>>w;
edges[i]={a,b,w};
}
int ans=bellman_ford();
if(ans==-0x3f3f3f3f){
cout<<"impossible"<<endl;
}else{
cout<<ans<<endl;
}
return 0;
}
算法分析:
时间复杂度:O(nm)O(nm),其中n为点数,m为边数
2.2.2 SPFA算法
算法思想:优化了Bellman-ford算法。在Bellman-ford算法中,dist[b] = min(dist[b],back[a] + w),如果a的距离没有更新,那么我的循环其实做了很多没用的操作。所以我们希望当a的距离更新时 ,再去用a更新其他结点的距离值。算法思想类似于Dijstra算法。
#include<bits/stdc++.h>
using namespace std;
const int N = 1e5+10;
int e[N],w[N],h[N],ne[N],idx;
int n,m;
int st[N];//记录结点是否在队列中,即是否发生更新
int dist[N];
void add(int a,int b,int c){
e[idx]=b;
w[idx]=c;
ne[idx]=h[a];
h[a]=idx++;
}
int spfa(){
memset(dist,0x3f,sizeof dist);
dist[1]=0;
queue<int> q;
q.push(1);
while(!q.empty()){
int t=q.front();
q.pop();
st[t]=false;
for(int i=h[t];i!=-1;i=ne[i]){
int j=e[i];
if(dist[j]>dist[t]+w[i]){//松弛操作
dist[j]=dist[t]+w[i];
if(!st[j]){//结点发生距离更新,所以可以用该结点去更新其他结点
q.push(j);
st[j]=true;
}
}
}
}
if(dist[n]==0x3f3f3f3f) return -0x3f3f3f3f;
return dist[n];
}
int main(){
memset(h,-1,sizeof h);
cin>>n>>m;
int a,b,c;
while(m--){
cin>>a>>b>>c;
add(a,b,c);
}
int ans=spfa();
if(ans==-0x3f3f3f3f) cout<<"impossible"<<endl;
else cout<<ans<<endl;
return 0;
}
算法分析:
Bellman_ford算法里最后return -1的判断条件写的是dist[n]>0x3f3f3f3f/2;而spfa算法写的是dist[n]==0x3f3f3f3f;其原因在于Bellman_ford算法会遍历所有的边,因此不管是不是和源点连通的边它都会得到更新;但是SPFA算法不一样,它相当于采用了BFS,因此遍历到的结点都是与源点连通的,因此如果你要求的n和源点不连通,它不会得到更新,还是保持的0x3f3f3f3f。
Bellman_ford算法可以存在负权回路,是因为其循环的次数是有限制的因此最终不会发生死循环;但是SPFA算法不可以,由于用了队列来存储,只要发生了更新就会不断的入队,因此假如有负权回路请你不要用SPFA否则会死循环。
由于SPFA算法是由Bellman_ford算法优化而来,在最坏的情况下时间复杂度和它一样即时间复杂度为 O(nm)O(nm) ,假如题目时间允许可以直接用SPFA算法去解Dijkstra算法的题目。
求负环一般使用SPFA算法,方法是用一个cnt数组记录每个点到源点的边数,一个点被更新一次就+1,一旦有点的边数达到了n那就证明存在了负环。
3.多源汇最短路径问题
Floyd算法
算法思想:三重循环,动态规划思想。dist[i][j]=min(dist[i][j],dist[i][k]+dist[k][j])dist[i][j]=min(dist[i][j],dist[i][k]+dist[k][j])
#include<bits/stdc++.h>
using namespace std;
const int N = 510,INF=1e9;
int g[N][N];//g[i][j]记录i->j的最短路径
int n,m,Q;
void floyd(){
for(int k=1;k<=n;k++){
for(int i=1;i<=n;i++){
for(int j=1;j<=n;j++){
g[i][j]=min(g[i][j],g[i][k]+g[k][j]);
}
}
}
}
int main(){
cin>>n>>m>>Q;
for(int i=1;i<=n;i++){//初始化数组
for(int j=1;j<=n;j++){
if(i==j) g[i][j]=0;
else g[i][j]=INF;
}
}
while(m--){//输入m条边
int a,b,c;
cin>>a>>b>>c;
g[a][b]=min(g[a][b],c);
}
floyd();
while(Q--){//Q次查询
int a,b;
cin>>a>>b;
if(g[a][b]>INF/2) cout<<"impossible"<<endl;
else cout<<g[a][b]<<endl;
}
return 0;
}
算法分析:三重循环,floyd算法时间复杂度为O(n)O(n)
__EOF__
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK