
3

工具使用-ROS在rviz中的应用实例 (python 版 basic shapes)
source link: https://zongweizhou1.github.io/2019/06/26/rviz-sending-basic-shapes/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
工具使用-ROS在rviz中的应用实例 (python 版 basic shapes)
发布 :
2019-06-26
浏览 :
Introduction
这个过程中,其实只是在定义publisher的node, 而rviz已经注册好的订阅器,指定了需要订阅的topic主题和消息类型,所以定义的node只需要写好发布器就行。
教程中给了如何使用cpp实现该功能,Markers:Sending Basic Shapes
所以我们这里使用python实现一遍。
Create Package
# ~/catkin_ws
catkin_create_pkg using_markers rospy visualization_msgs
catkin_make
. devel/setup.bash
Publisher node
roscd using_markers
mkdir scripts
vim basic_shapes.py
shape.py内容:
#!/usr/bin/env python
import rospy
import time # 主要是调用了sleep函数
from visualization_msgs.msg import Marker # 可以通过rosmsg show visualization_msgs/Marker查看marker的内容
def main():
rospy.init_node("basic_shapes", anonymous=True) # 创建node, 命名basic_shapes
rate = rospy.Rate(1) # 消息发布的刷新频率
pub = rospy.Publisher("visualization_marker", Marker, queue_size=1)
# pub定义了一个发布器, 名称visualization_marker, 注意这个topic的名称是固定的,因为rviz中对应marker的订阅器订阅的topic就是visualization_marker,消息类型Marker
shape = Marker.CUBE # 形状参数,python直接通过类的属性默认值访问
while not rospy.is_shutdown(): # 当node没被杀掉时,执行循环
marker = Marker() # 定义Marker类型的变量
marker.header.frame_id = "/my_frame" # 设置header的frame——id和stamp属性值
marker.header.stamp = rospy.Time.now() # 这里应该是一个浮点值,对应cpp版本 ros::Time::now()
# 下面两个量定义了该marker的命名空间和id, 通过这两个量能够确定marker的身份,如果身份相同,那么则刷新rviz中对应目标。后面我们会讲到marker是什么
marker.ns = "basic_shapes"
marker.id = 0
marker.type = shape # marker的类型
marker.action = Marker.ADD # marker action
# 初始化了marker的位置和初始的角度
marker.pose.position.x = 0
marker.pose.position.y = 0
marker.pose.position.z = 0
marker.pose.orientation.x = 0.0
marker.pose.orientation.y = 0.0
marker.pose.orientation.z = 0.0
marker.pose.orientation.w = 1.0
# marker的尺寸大小,这里1.0对应于现实地图的1m
marker.scale.x = 1.0
marker.scale.y = 1.0
marker.scale.z = 1.0
# marker的颜色定义, 注意透明度a的设置,为0就看不到了
marker.color.r = 0.0
marker.color.g = 1.0
marker.color.b = 0.0
marker.color.a = 1.0
marker.lifetime = rospy.Duration()
while pub.get_num_connections() < 1:
# get_num_connections()是python版本查阅当前topic的订阅器数目, cpp版本对应函数:
# marker_pub.getNumScribers()
# 用来判断当前是否有订阅器,也就是说rviz是否打开,如果没有订阅器没必要发布消息。当然没有订阅器情况下发布消息也是没问题的。
if rospy.is_shutdown():
exit(1)
rospy.loginfo("Please create a subscriber to the marker!")
time.sleep(1) # 休眠等待,不断查询有没有订阅器
pub.publish(marker) # 发布消息
# 每次发布的消息不同,从而让rviz绘制不同的marker
if shape == Marker.CUBE:
shape = Marker.SPHERE
elif shape == Marker.SPHERE:
shape = Marker.ARROW
elif shape == Marker.ARROW:
shape = Marker.CYLINDER
elif shape == Marker.CYLINDER:
shape = Marker.CUBE
rate.sleep() # 指定频率刷新
if __name__== "__main__":
try:
main()
except rospy.ROSInterruptException:
pass
build and run
cd ~/catkin_ws
catkin_make
roscore # 打开master
另起两个终端分别执行:
rosrun using_markers basic_shapes.py
rosrun rviz rivz
则将两个线程都跑起来,接下来还需要设置rviz,才能看到效果。
设置rviz
rviz刚打开的界面
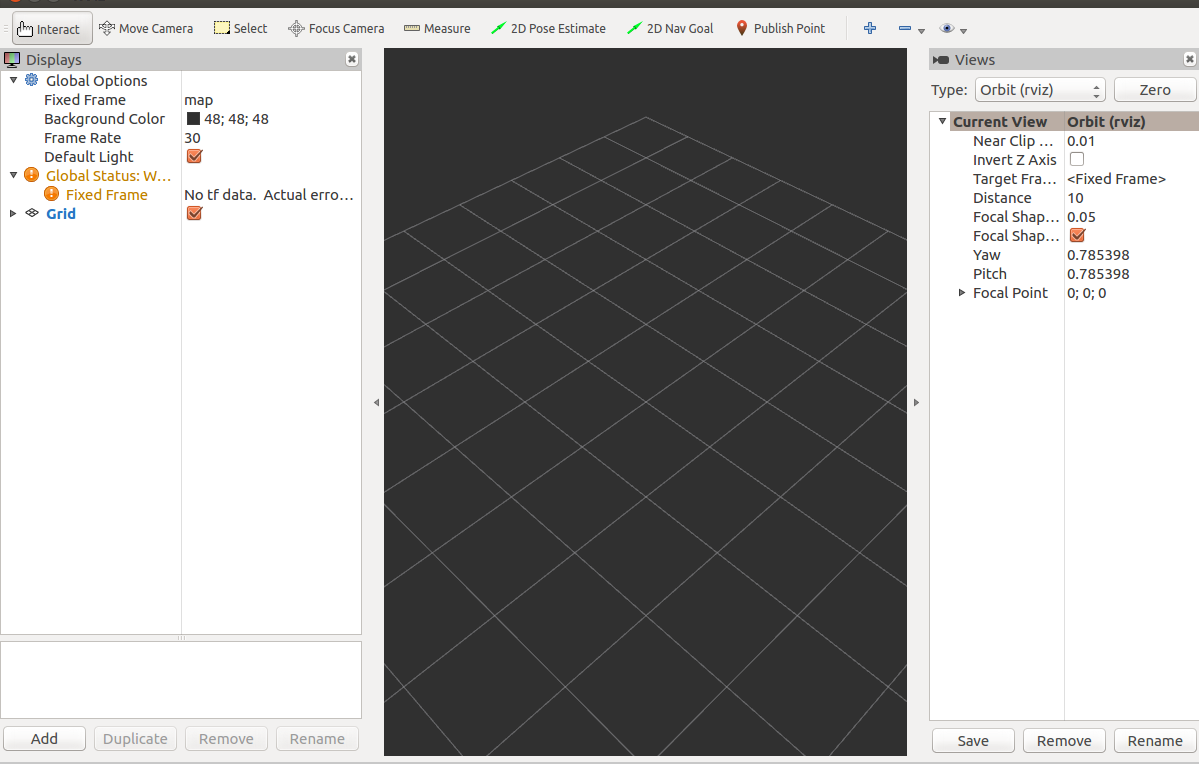
然后将左边栏中的 Fixed Frame的值修改为 /my_frame 即代码中header.frame_id定义的量。
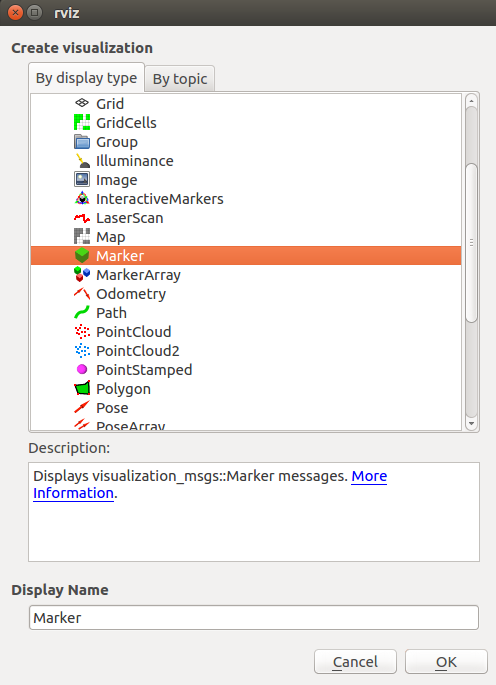
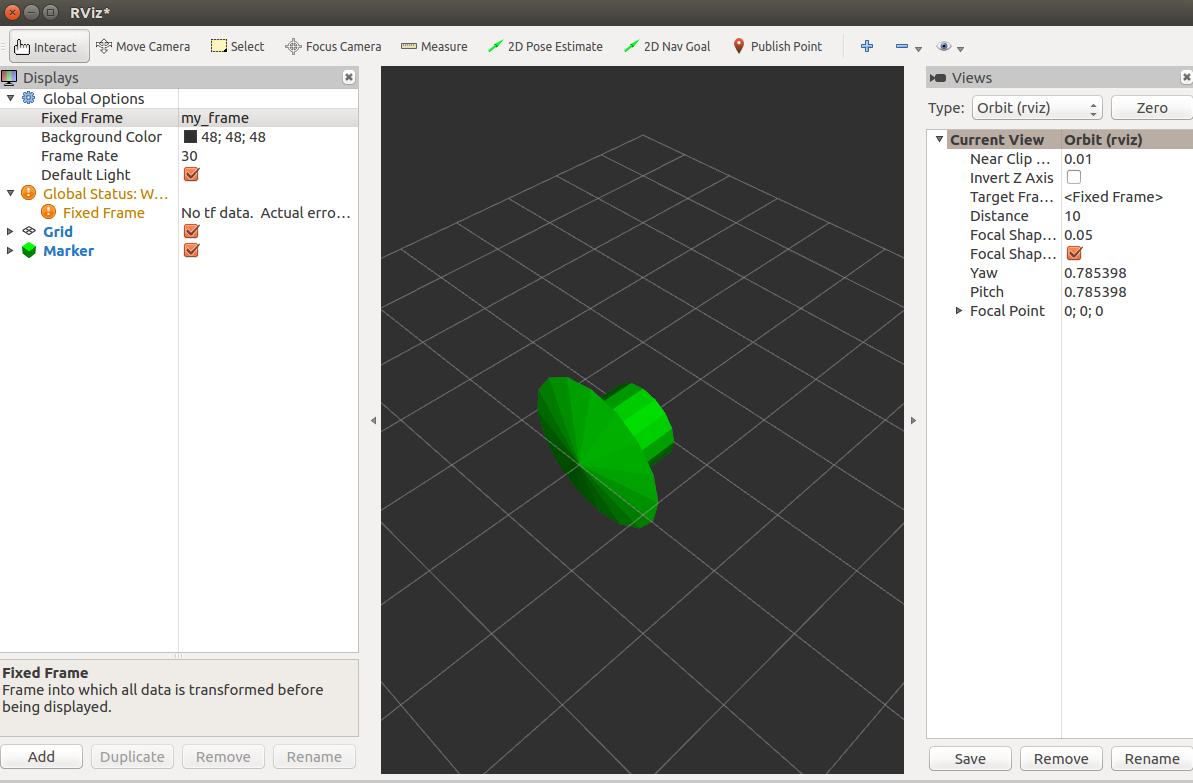
然后点击左下角的Add 选择要添加的type, 显然我们这里传递的消息类型是Marker, 所以选择Marker
然后就能看到结果了。
知识 & 情怀 | 赏或者不赏,我都在这,不声不响
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK