

剥个香蕉要9步?为了让机器人不破坏果肉,研究人员花13个小时剥了数百根香蕉
source link: https://www.51cto.com/article/705064.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.


大数据文摘出品
作者:Caleb
以波士顿动力为代表,现在机器人能做的事可以说是越来越多了,不少人都在担心机器人是不是早晚会取代自己的工作。

但其实在一些更细节的事情上,机器人和人类相比还是得略逊一筹,比如剥香蕉。
但…真的会有这个工作吗?[doge]
2018年,卡耐基梅隆大学的研究人员制作了一套名为Fingervision的系统,赋予了机器人粗略的触觉。这套系统安装在机器人Baxter的手臂末端后,就能完成一系列抓取的动作,比如剥香蕉。

不过可以看到,机器人的动作还远称不上灵活,并且,剥香蕉并不只是把皮剥开就行,还得小心不要破坏了果肉。
如何用机器人的行为模式完成如此细腻的动作,这就成为了一个难题。
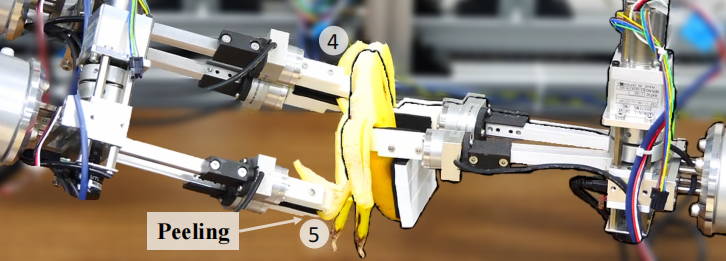
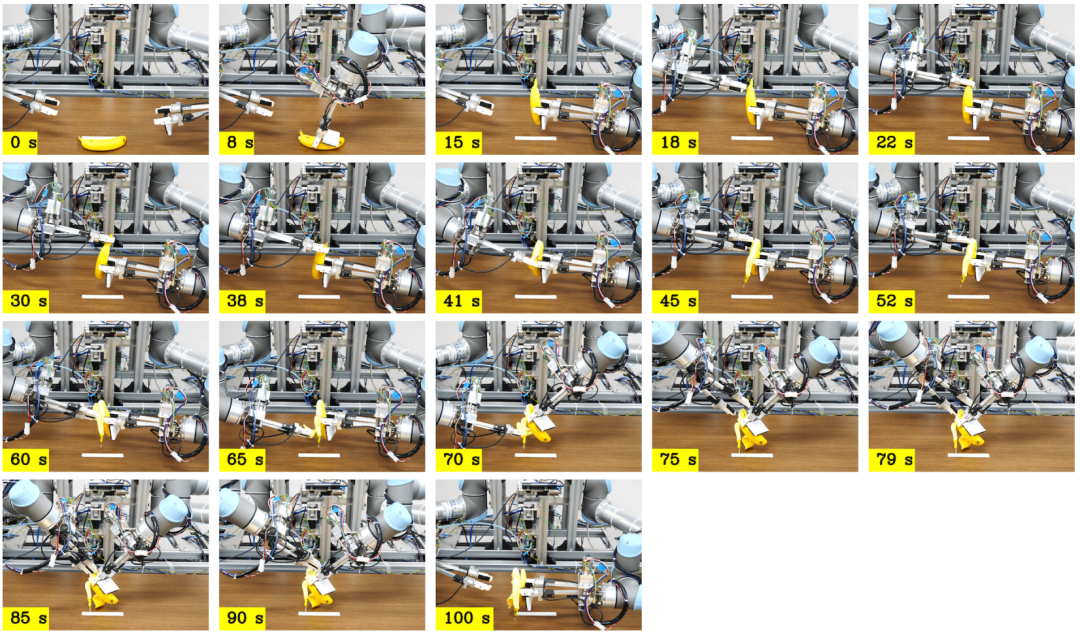
就在最近,日本东京大学的研究人员开发了这么一个机器人,装备有2条手臂和2只手,每只手都有两个可以抓住物体的“手指”。为了训练机器人剥香蕉,一位研究人员在13个小时内剥了数百根香蕉,如此就有了足够的数据来训练机器人做这件事。
根据研究人员表示,他们将剥香蕉这个事分解成了9个阶段,就结果来看,在57%的时间里,机器人能够成功在剥开香蕉的同时保证果肉不被破坏,平均而言,整个过程每次不到3分钟。

相关研究已经以论文的形式进行了发表:
论文链接:https://arxiv.org/pdf/2203.09749.pdf
没想到剥个香蕉也可以这么复杂
让我们来看看这个剥香蕉实验到底是怎么回事。
实验使用的机器人框架包括了一个双臂机器人系统,有两个UR5(Universal Robots)机械手和两个与UR5机器人运动学参数相同的控制器。示范数据是通过用控制器控制机器人产生的。一个ZED迷你立体相机(StereoLabs)被安装在具有二维平移结构的机器人系统上。
在这项研究中,摄像机被固定在可以观察香蕉的位置上。人类操作员在操作机器人时,可以通过头戴式显示器看到立体摄像机图像。此外,一个眼球追踪器(Tobii)被安装在HMD上,以实时测量操作者的目光位置。
一位研究人员操作机器人剥了数百根香蕉皮,生成了811分钟的演示数据,来训练机器人自己去做这件事,这项任务被分为9个阶段,从抓住香蕉到用一只手把它从桌子上拿起来,用另一只手抓住顶端,剥香蕉皮,然后移动香蕉,这样剩下的皮就可以被剥掉了:
- 抓住香蕉:用左手抓起桌上的香蕉;
- 拾起:举起香蕉;
- 握住尖端:右手伸手握住香蕉的尖端;
- 剥皮:剥开香蕉尖;
- 向右移动:右手靠近接触右边的果皮;
- 剥右边的皮:右手握住香蕉皮,并将其剥开;
- 重新定位:转动香蕉,使右手可触及到左边的果皮;
- 伸左手:右手靠近接触左边的果皮;
- 剥左边的皮:右手握住左皮,将其剥开。

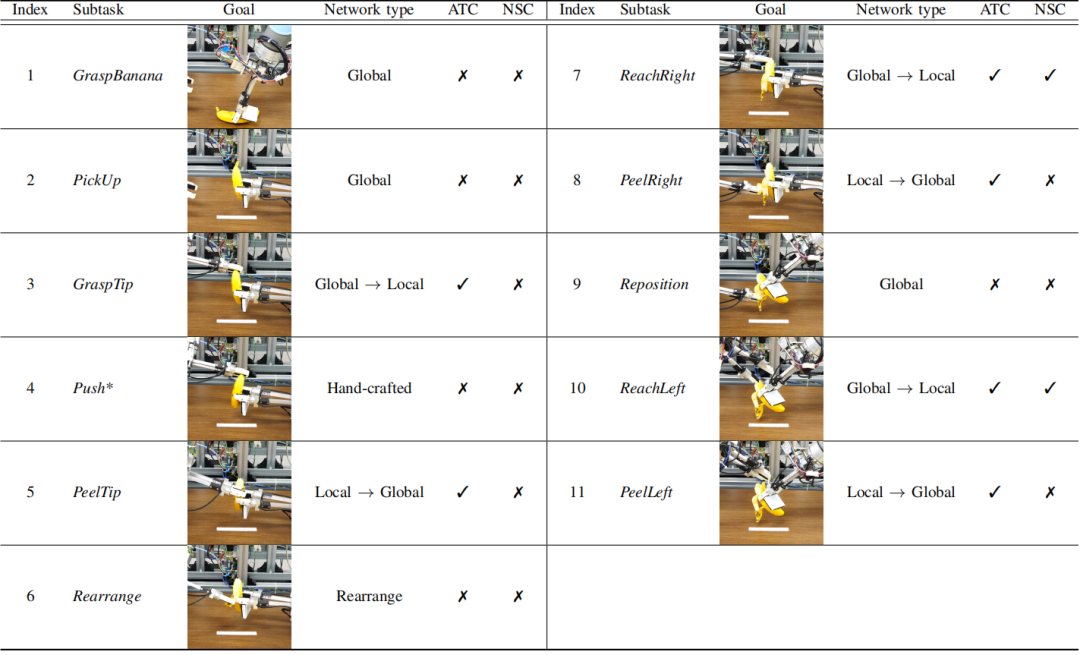
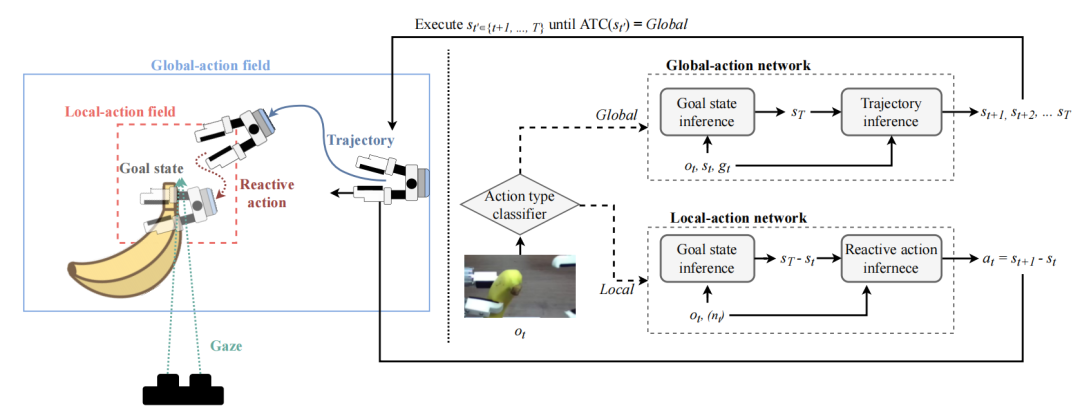
对于不太可能损坏香蕉的大范围运动,机器学习模型会绘制出一条轨迹,模仿人类无需太多思考的行为。但当手臂被要求精确地操纵香蕉时,系统就会切换到一种反应性方法,对环境中的意外变化做出反应。
每个实验都使用15根香蕉进行测试,根据结果,该机器人剥香蕉的成功率为57%,整个过程不到3分钟。
英国谢菲尔德大学的Jonathan aitken表示:“在这个案例中,真正有趣的是,人类使用的过程已经通过深度模仿学习应用到机器人系统的训练中。”
Kim还补充道,他的方法具有数据效率,因为它使用了13小时的训练数据,而不是数百或数千小时的训练数据。“它仍然需要大量昂贵的GPU(图形处理单元),但通过使用我们的结构,我们可以减少大量的计算量”。但他同时也说,如果有更好的运动控制,可能会工作得更好,这项技术也不会仅仅用于香蕉,其目标是训练一个系统,使其能够更广泛地处理需要精细运动技能的任务。
机器人学剥香蕉皮已经很久了
除了剥香蕉这种说简单又简单、说难也确实有点难度的事情,越来越多的机器人把目光投向了厨房。
今年2月,瑞士科学家推出了Bouebot Robot来制作出完美的奶酪火锅。从倒入葡萄酒,到搅拌并撒一些胡椒粉,捡起一根金属钉、刺穿一块面包,然后放在支架上,这些行为的难度也都不低。

上图中项目技术经理Ludovic Aymon使用控制板将机器人手臂向下移动到每个奶酪三角形,通过在顶部产生真空来提升该奶酪三角形。
根据项目技术经理Ludovic Aymon的说法,开发这个机器人最大的挑战是让精密机械机器人来处理不精确的有机材料。比如奶酪等材料就是不完全平坦或高度不完全相同。
据Workshop 4.0联合总监、现年30岁的Nicolas Fontaine说,“我们想做一个……将创新与瑞士传统相结合的项目,火锅是一个完美的选择。对于瑞士人来说,火锅是象征性的。这也是非常情绪化的事情,因为它是我们身份的一部分,我们的专业知识。火锅是一种欢乐的东西……这是一个很好的机会,可以吸引人们谈论机器人技术以及如何使用它。”
早在2007年,美国麻省理工学院就研制出智能机器人Domo,它有和人类相似的眼睛和手臂,能根据外界环境调节自己的行动,当然也还会剥香蕉。
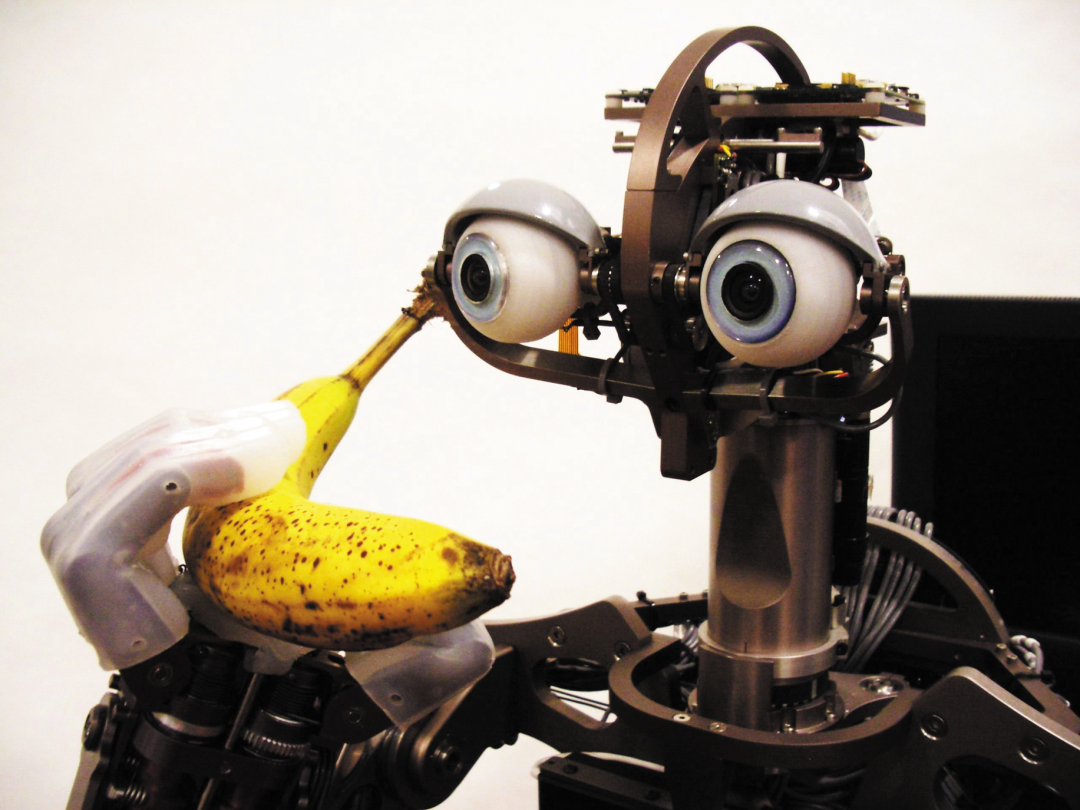
Aaron Edsinger是Domo研发小组带头人,也是MIT计算机科学和人工智能实验室的博士后,他介绍道,Domo的两只眼球实际上是2个与12台计算机相连的摄像头,能主动观察周围环境,并采取相应行动。例如,和人面对时,它的目光会聚焦在对方脸部。Edsinger还表示:“把机器人的眼睛设计得更加拟人化,有助于增强它和外界、人类之间的互动和交流。”
除此之外Domo还能完成一些很灵巧的活动,例如剥香蕉。和只能按照预设程序操作的生产线机器人相比,Domo还可以在未知的环境中自主做出决定并完成任务。
但也正如Edsinger指出,虽然机器人在操作乘区上开始学习人类,但要真正做到像人类一样的自如和自然,还有很长的路要走。
Recommend
-
32
必囤年货:亲亲 果肉果冻 520g*2袋 *7件 54.65元包邮(双重优惠),来自什么值得买甄选出的天猫超市优惠产品,汇聚数十万什么值得买网友对该网购产品的点评。
-
22
-
32
-
7
-
16
【猎云网(微信:)北京】2月18日报道 近日,网校品牌「果肉网校」宣布完成清流资本、头头是道和真格教育基金的A 轮、及微光创投的A...
-
2
果肉场景下落地页演进过程 此处的过程更多的是在前端的思考 此处描述我们做落地页的演进过程。 一般我们业务场景,低价课的导流模式一般通过公域流量 或者我们社区运营的私域流量。 主要的页面形式主要也就分为购课用的页面 俗...
-
3
【京东】领299-150券榴莲西施 冷冻榴莲果肉300g 拍2件云南高山沃柑特级果2.5k 【京东】领299-150券
-
4
不捏烂不撕碎,机器人也会剥香蕉皮
-
6
2022 年,机器人终于会剥香蕉皮了 剥开一个香蕉需要几步?拿起香蕉,用一只手捏着香蕉皮,剥开。或许有的人会纠结一下要从头部开始还是从尾部开始,但不损坏香蕉的同时剥皮是一件轻松不费时的事。
-
1
麻省理工科技评论-香蕉叶化身机器人?华南师范大学团队合成新型基于生物质微导管的微米机器人,有望用于精准医疗及环境治理香蕉叶化身机器人?华南师范大学团队合成新型基于生物质微导管的微米机器人,有望用于精准医疗及环境治理香蕉叶...
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK