

24岁蒙族青年研发目前最灵活的单腔机器手,可弯曲36个不同方向,有望用于微创手术末端...
source link: http://www.mittrchina.com/news/detail/9945
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.


近日,24 岁的蒙古族男生杨毕力格研发出“世界上最灵活的单腔软体机器手指”,在只有一个主腔的软体手指中,机器手指可弯曲到 36 个不同方向。
这款机器手不仅能抓魔方。
(来源:Science Advances)
还可以拧瓶盖。
(来源:Science Advances)
面向各个方向都能弯曲自如。
(来源:Science Advances)
10 月 1 日,相关论文以《可编程软驱动和变形》(Reprogrammable soft actuation and shape-shifting via tensile jamming)为题发表在 Science Advances 上。

图 | 相关论文(来源:Science Advances)
杨毕力格表示,单腔流体压力驱动的软体机器人手指,大多只有一个固定运行轨迹,即向内弯曲抓取。这一运行轨迹由材料结构和模量确定,所以在使用过程中,机器人手指无法弯向更多方向。

图 | 杨毕力格(来源:受访者)
其中,一种解决方法是多腔体结合,让不同腔体引发不同形变,借此让手指弯向多个方向。但是这种方式会极大增加手指半径,让小型化应用比如用作微创手术的末端执行器变得非常困难。
使用此次由纤维材料制备的软体机器手指,尽管仍然只有一个主腔来供应流体压力,但是周围四壁可以改变刚度。这样在使用过程中,手指就具备向各个方向弯曲的能力。
(来源:Science Advances)
引入材料特性可变的、拉伸可控的应变限制器
说到研究出发点,杨毕力格表示,自然生物可通过调整身体结构、刚度、以及行为来适应环境变化。比如,章鱼触手和毛虫都能通过调整身体内部的流体压力,来完成捕食和逃脱等不同任务。
目前,多数软体机器人利用流体压力引发的体积扩张,来进行形变和完成抓取或爬动等行为。但是,由于这种形变受制于整个身体结构以及不同材料的杨氏模量,机器人身体应变和总体形变的方向,在它自身完成制备之后便被固定下来。
在不断变化的任务环境中,一成不变的运动轨迹和身体形式,导致机器人的可适应性受到限制。这时,最简单的解决方法是采取多内腔结构设计,从而在不同内腔进行压力传导时,可以控制机器人最终的形变方向。
但是,这种设计极大增加了机器人的体积。另外一种方式是通过在软体内壁里嵌入可变模量材料,通过杨氏模量的变化,来改变最终的运动轨迹。
(来源:受访者)
目前最先进的可变模量材料中,热激活材料的反应时间往往太长,真空阻塞材料则会给软体材料增加不必要的刚性,静电离合器则因采用了高压带从而会来安全隐患,因此它们都无法有效用于软体机器人。
对于下一代机器人的设计来说,让机器人主动调整自己刚度,从而模拟生物体在运动和形状变化方面的控制和流动性是至关重要的。为了这一目的,不同于以往使用的材料特性不可变的的应变限制器,杨毕力格引入了材料特性可变的、且拉伸可控的应变限制器。
一直以来,真空引发的阻塞在物理界被广泛研究。近几年,才慢慢应用在软体机器人领域。最开始是把咖啡渣放在气囊里,抽真空之后刚度迅速提升,这样即可用来做软体抓手。有的实验室把纸张叠加,抽真空之后,让弯曲刚度迅速提升,借此演示了一些新型变形家具。
在原来这些阻塞技术中,都没能有效单独控制拉伸刚度。要么无法控制拉伸刚度,要么影响了其他几个方向的刚度。但是,拉伸刚度以及表面局部应变的控制,才是决定延展性软体机器人形变的根本因素。可惜的是,目前的阻塞技术只能改变材料的压缩刚性和弯曲刚性,没有能单独改变拉伸刚性的有效技术。
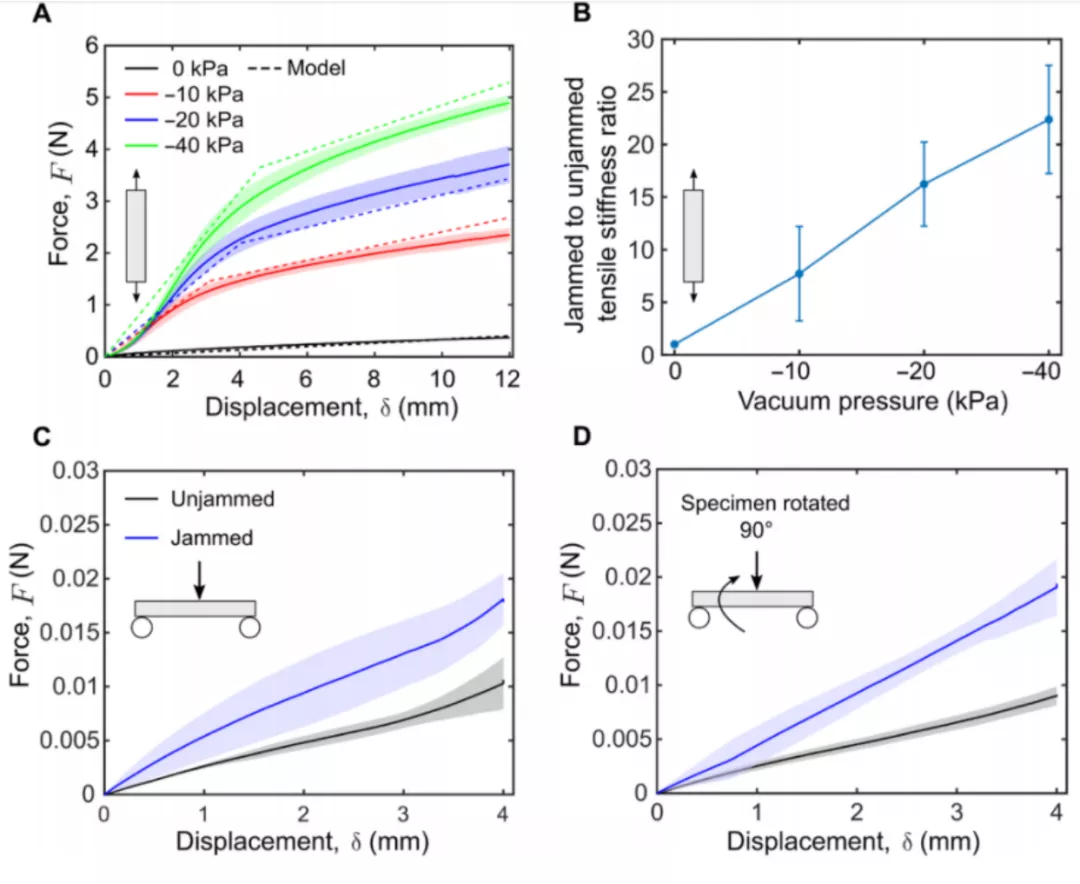
而杨毕力格研发的纤维材料包含两种节段:硅胶弹性节段和聚酯纤维非弹性节段。在非阻塞阶段,硅胶弹性节段能帮助纤维材料保持 200% 的弹性。
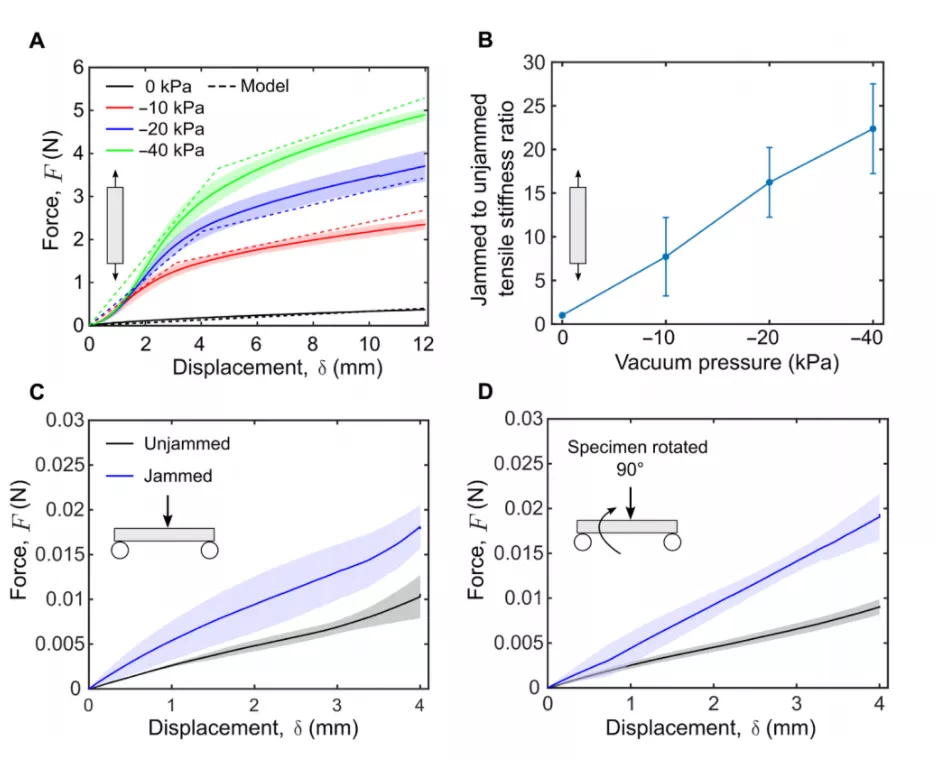
开启真空之后,纤维间的距离会被压缩,相互作用会变得更显著,这些非弹性的聚酯纤维连成网络,即可提高整个材料的拉伸刚性,甚至可达到原来的20倍。
(来源:受访者)
基于分段式软体纤维的可变模量材料
附在延展的软体机器人上,这种材料能在局部控制表层应变,实从而现可编辑的精准形变。对于在非结构化的环境中作业的机器人,这种材料可让机器人更好地应对突发任务,并能通过及时改变身体结构来应对挑战。
他告诉 DeepTech,在软体机器人及其抓手上,真空引发的阻塞效应有着广泛应用。比如,通过模量的变化可以实现软硬形态的改变。
(来源:Science Advances)
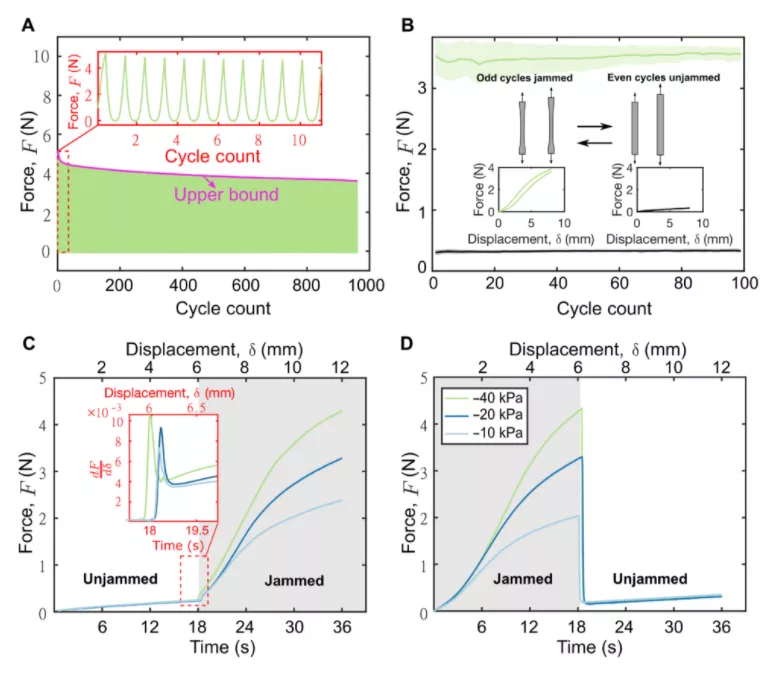
该材料的抗疲劳性,在压缩状态下反复伸展 1000 次后,仍能保持 70% 的拉力。在反复开启真空压缩 100 次之后,材料仍和初始状态保持一致。加上真空的快速作用,只需要不到十分之一秒,材料就能在已拉伸状态下实现拉伸刚性的变化。
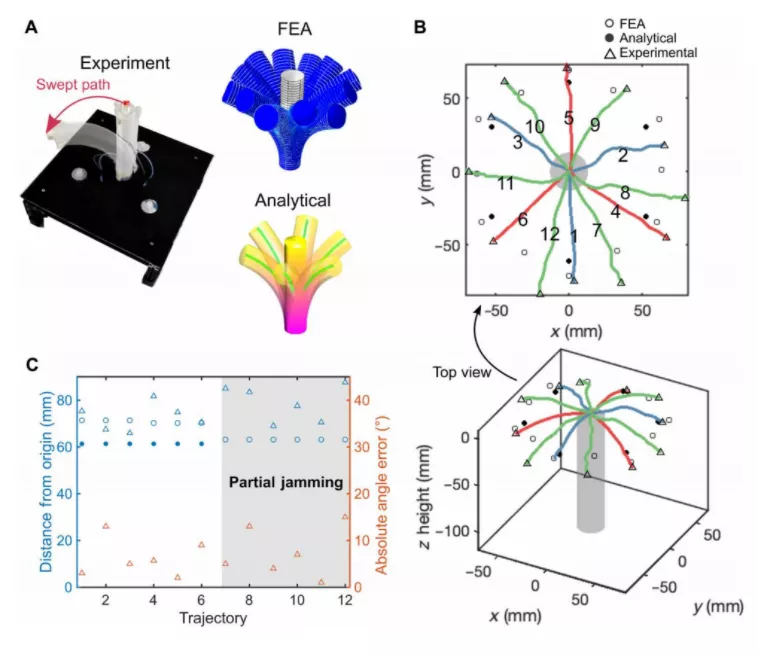
在把此次纤维材料附在圆柱形的软机器手指四周后,通过不同的刚性组合,机器手指可灵活地弯向各个角度。在实际实验中,可实现 36 个不同方向的可控弯曲。
(来源:Science Advances)
在软体机器人技术领域,拉伸阻塞技术拥有很大潜力,它能在不增加较大体积或不引起高弯曲刚度的同时,给单室、体积膨胀的软执行器的工作空间带来极大改善。
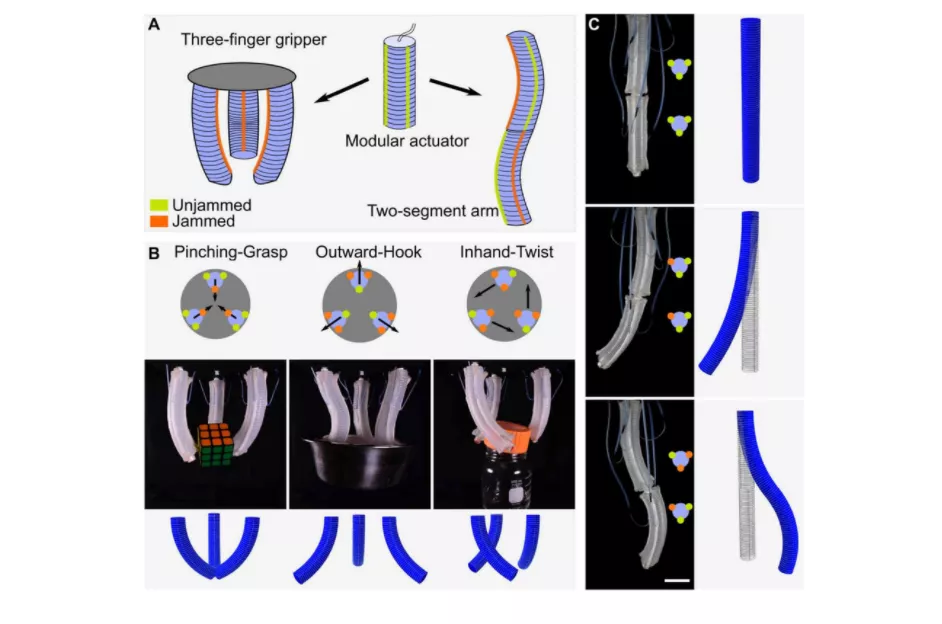
杨毕力格表示,这也是目前“世界上最灵活的单腔软体机器手指”。通过数学分析和物理模拟,即可准确预测手指弯曲的方向。由于软体手指是模块化的,因此他组装出一个多模式抓手。
抓手可向内弯曲去拾取小型物体,也可向外弯曲来钩取大型框架类物体,还可在手内旋转来打开瓶盖和拧紧灯泡。
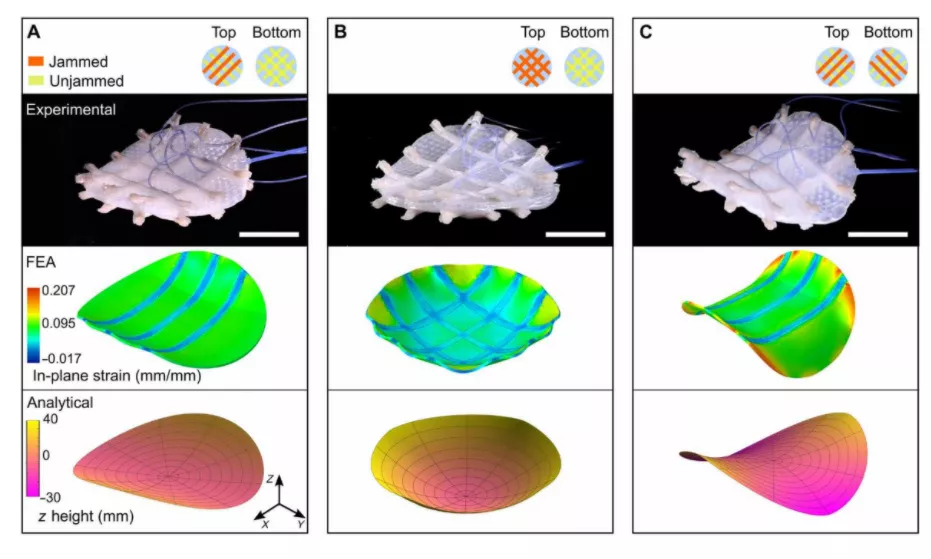
通过将执行器串联起来,杨毕力格组装出一个多模式灵活机器臂,他还把纤维材料附着在一个饼型的可延展薄膜上,这时可通过表面不同的模量变化,让薄膜在伸展之后达到三种不同的高斯弧度,从而给未来创造可变物理显示器提供了一条有效路径。
(来源:Science Advances)
此次的径向约束单腔执行器,使用的是很小的拉伸纤维,这是一种一维原件,比当前的多腔致动器更细长,并且能避免在弯曲时所需的大径向膨胀。在平面二维情况下,通过改变不同方向的拉伸刚度,再加上潜在的膨胀,就能控制其高斯曲率。
研究中,杨毕力格首次展示了在同一系统内三种高斯曲率之间的主动转变。据悉,拉伸干扰纤维能在保持低弯曲刚度的同时,增加自己的拉伸刚度,从而让薄表面的弯曲能和拉伸之间重新分配,这也有助于显著的形状变化。
理论上,只要有了足够数量的干扰纤维,一个膨胀的二维薄片就可以生长成为任何目标表面中,并在这些形状之间变化。
有望用于微创手术的末端执行器
关于应用,杨毕力格告诉 DeepTech,在进一步小型化之后,这种材料有望用于微创手术的末端执行器上。执行器一般需要进行且多方向的灵活弯曲,而这款材料可以很好地胜任。
由于具有快速响应以及促进执行器动态中期充气的能力,相比促进激活应变限制组件,这种多模态驱动器在应用中的响应更快,且比高压激活离合器更安全。
在轨迹控制改进的同时,多模态驱动器却不会增加体积,这尤其适用于致动器的截面积需要最小化的应用,例如当用于内窥镜微创手术时。
(来源:受访者)
杨毕力格在论文中表示,该演示为下一代变形机器人铺平了道路,可让下一代机器人适应环境需求,并以形状变化的方式进行动态伪装。
除了应用于机器人领域,他预测干扰纤维也将在外辅助康复中发挥用武之地,在外辅助康复技术中,患者只要恢复一部分的活动能力,将相当于康复了。其他可能的用途,包括智能服装,以及需要可预测的、快速的、局部强度刚度变化的应用场景。
在大型化后,这款材料还可用于软体机械外骨骼,它能快速有效地提供阻力,可以在医疗领域用来辅助手术后病人的肌肉康复,也可以在仓储运输领域助力搬运工人的抓取和拿持。
该研究完成于 2020 年疫情期间,他等了四个月才等到去实验室的机会,但是实验室的容纳人数远少于疫情之前,进去也需要提前登记。为了每天有足够的时间做实验,他早上 4 点半起来先去实验室,在别人都不在的时候用实验仪器。
(来源:Science Advances)
杨毕力格来自内蒙古自治区,生于 1997 年。本科时,杨毕力格就读于美国斯沃斯莫尔学院,这是宾夕法尼亚州费城郊区的一所小型文理学院,当时学的是通用工程,该专业比较灵活,可以选多个方向的课,这样他有机会学习机械制造、电子电路设计、计算机编程、机器视觉和运动控制。
本科期间,他在加州大学圣地亚哥分校(USCD)的软体机器人实验室 Mike Tolley Lab 做过研究助理,从那时起接触到软体机器人。
(来源:Science Advances)
本科毕业后,他来到耶鲁并加入 Rebecca Kramer-Bottiglio 的实验组读直博。杨毕力格所在的耶鲁软体机器人实验室主要做材料科学研究,特别是软体聚合物科学,同时也会拓展新型材料比如液态金属、形状记忆合金在机器人领域的创新性应用。
该课题组主体钻研的的交叉学科—软体机器人领域,致力于制造能够媲美自然界生物的机动性以及可适应性的人造材料。该课题组既做材料方向的研究,也做机器人的研究。他自己想做的方向是利用材料方面的突破,来加速机器人在生活中的应用。
谈及未来,他表示毕业之后几年的计划还没有确定。但可能会先在目前科技行业内深耕,最终的目标是做一家为社会提高生产力,让人们过上更幸福生活的机器人企业。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK