

奔驰定理与重心坐标
source link: https://wangjiezhe.com/posts/2021-03-12-Barycentric-coordinate-system/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

1. 奔驰定理
在讲平面向量的时候,遇到了一个经典的题目:
已知点 PPP 为 △ABC\triangle ABC△ABC 内一点,求证:S△PBC⋅PA→+S△PCA⋅PB→+S△PAB⋅PC→=0S_{\triangle PBC} \cdot \overrightarrow{PA} + S_{\triangle PCA} \cdot \overrightarrow{PB} + S_{\triangle PAB} \cdot \overrightarrow{PC} = \mathbf{0}S△PBC⋅PA+S△PCA⋅PB+S△PAB⋅PC=0.
证明如下:如图,延长 APAPAP 交 BCBCBC 于 点 QQQ,则 S△PBCS△PCA+S△PAB=∣PQ∣∣AP∣\dfrac{S_{\triangle PBC}}{S_{\triangle PCA} + S_{\triangle PAB}} = \dfrac{|PQ|}{|AP|}S△PCA+S△PABS△PBC=∣AP∣∣PQ∣,
故 PQ→=−S△PBCS△PCA+S△PAB⋅PA→\overrightarrow{PQ} = - \dfrac{S_{\triangle PBC}}{S_{\triangle PCA} + S_{\triangle PAB}} \cdot \overrightarrow{PA}PQ=−S△PCA+S△PABS△PBC⋅PA.
另外,因为 ∣BQ∣:∣QC∣=S△PAB:S△PCA|BQ|:|QC| = S_{\triangle PAB} : S_{\triangle PCA}∣BQ∣:∣QC∣=S△PAB:S△PCA,所以 PQ→=S△PCA⋅PB→+S△PAB⋅PC→S△PCA+S△PAB \overrightarrow{PQ} = \dfrac{S_{\triangle PCA} \cdot \overrightarrow{PB} + S_{\triangle PAB} \cdot \overrightarrow{PC}}{S_{\triangle PCA} + S_{\triangle PAB}}PQ=S△PCA+S△PABS△PCA⋅PB+S△PAB⋅PC,
故 −S△PBC⋅PA→=S△PCA⋅PB→+S△PAB⋅PC→- S_{\triangle PBC} \cdot \overrightarrow{PA} = S_{\triangle PCA} \cdot \overrightarrow{PB} + S_{\triangle PAB} \cdot \overrightarrow{PC}−S△PBC⋅PA=S△PCA⋅PB+S△PAB⋅PC,移项后命题得证.
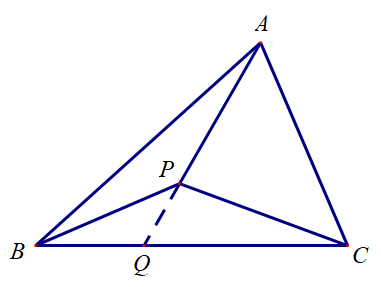
这个结论因为它的图形长得像奔驰的标志,被称为 “奔驰定理”.
这个名字最早的出处不详,但实际上,这对应的就是三角形的 “重心坐标”.
2. 三角形的重心坐标
对 △ABC\triangle ABC△ABC 所在平面内任意一点 PPP,如果存在不全为零的实数 λ0\lambda_0λ0,λ1\lambda_1λ1,λ2\lambda_2λ2,使得
(λ0+λ1+λ2)OP→=λ0OA→+λ1OB→+λ2OC→\left( \lambda_0 + \lambda_1 + \lambda_2 \right) \overrightarrow{OP} = \lambda_0 \overrightarrow{OA} + \lambda_1 \overrightarrow{OB} + \lambda_2 \overrightarrow{OC} (λ0+λ1+λ2)OP=λ0OA+λ1OB+λ2OC
对平面内任意一点 OOO 成立,则称 (λ0:λ1:λ2)( \lambda_0 : \lambda_1 : \lambda_2 )(λ0:λ1:λ2) 为点 PPP 相对于 △ABC\triangle ABC△ABC 的重心坐标.
显然,重心坐标并不是唯一的,(kλ0:kλ1:kλ2)( k \lambda_0 : k \lambda_1 : k \lambda_2 )(kλ0:kλ1:kλ2) 也是点 PPP 相对于 △ABC\triangle ABC△ABC 的重心坐标.
为了保证唯一性,我们可以进行对其正规化,取 λi′=λi/∑k=02λk\lambda_i^\prime = \lambda_i / \displaystyle\sum_{k=0}^2 \lambda_kλi′=λi/k=0∑2λk ,则 ∑i=02λi′=1\displaystyle\sum_{i=0}^2 \lambda_i^\prime = 1i=0∑2λi′=1,此时称 (λ0′:λ1′:λ2′)(\lambda_0^\prime : \lambda_1^\prime : \lambda_2^\prime)(λ0′:λ1′:λ2′) 为其正规化(重心)坐标.
2.1. 重心坐标的存在性
对 △ABC\triangle ABC△ABC 所在平面内任意一点 PPP,根据平面向量基本定理,存在唯一的实数对 (λ,μ)(\lambda, \mu)(λ,μ),使得 AP→=λAB→+μAC→\overrightarrow{AP} = \lambda \overrightarrow{AB} + \mu \overrightarrow{AC}AP=λAB+μAC.因此
OP→=OA→+AP→=OA→+λAB→+μAC→=OA→+λ(OB→−OA→)+λ(OC→−OA→)=(1−λ−μ)OA→+λOB→+μOC→\begin{aligned} \overrightarrow{OP} &= \overrightarrow{OA} + \overrightarrow{AP} \\ &= \overrightarrow{OA} + \lambda \overrightarrow{AB} + \mu \overrightarrow{AC} \\ &= \overrightarrow{OA} + \lambda \left( \overrightarrow{OB} - \overrightarrow{OA} \right) + \lambda \left( \overrightarrow{OC} - \overrightarrow{OA} \right) \\ &= (1-\lambda-\mu)\overrightarrow{OA} + \lambda\overrightarrow{OB} + \mu\overrightarrow{OC} \end{aligned} OP=OA+AP=OA+λAB+μAC=OA+λ(OB−OA)+λ(OC−OA)=(1−λ−μ)OA+λOB+μOC
取 (λ0,λ1,λ2)=(1−λ−μ,λ,μ)( \lambda_0, \lambda_1, \lambda_2 ) = (1-\lambda-\mu,\lambda,\mu)(λ0,λ1,λ2)=(1−λ−μ,λ,μ) 即可.注意这已经是正规化坐标.
2.2. 正规化坐标的符号
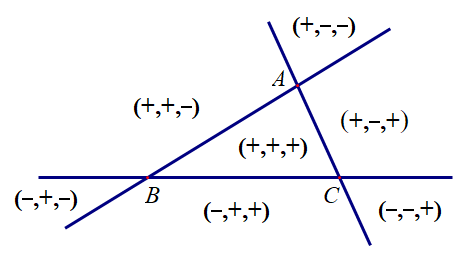
当点 PPP 位于 △ABC\triangle ABC△ABC 内部的时候,λ,μ,λ+μ∈(0,1)\lambda, \mu, \lambda+\mu \in (0,1)λ,μ,λ+μ∈(0,1),故 1−λ−μ∈(0,1)1-\lambda-\mu \in (0,1)1−λ−μ∈(0,1),也就是三项均是正数.
对于 △ABC\triangle ABC△ABC 外的情况,可以参考下图:
2.3. 重心坐标的几何意义
在平面直角坐标系 xOyxOyxOy 中,设 A(x1,y1)A(x_1,y_1)A(x1,y1),B(x2,y2)B(x_2,y_2)B(x2,y2),C(x3,y3)C(x_3,y_3)C(x3,y3),P(xP,yP)P(x_P,y_P)P(xP,yP),点 PPP 相对于 △ABC\triangle ABC△ABC 的重心坐标为 (α:β:γ)(\alpha:\beta:\gamma)(α:β:γ),其中 α+β+γ=1\alpha+\beta+\gamma=1α+β+γ=1.
根据定义,OP→=αOA→+βOB→+γOC→\overrightarrow{OP} = \alpha\overrightarrow{OA} + \beta\overrightarrow{OB} + \gamma\overrightarrow{OC}OP=αOA+βOB+γOC,
因此
{xP=αx1+βx2+γx3yp=αy1+βy2+γy31=α+β+γ⟺(xPyP1)=(x1x2x3y1y2y3111)(αβγ)\left\{ \begin{aligned} x_P &= \alpha x_1 + \beta x_2 + \gamma x_3 \\ y_p &= \alpha y_1 + \beta y_2 + \gamma y_3 \\ 1 &= \alpha + \beta + \gamma \end{aligned} \right. \Longleftrightarrow \begin{pmatrix} x_P \\ y_P \\ 1 \end{pmatrix} = \begin{pmatrix} x_1 & x_2 & x_3 \\ y_1 & y_2 & y_3 \\ 1 & 1 & 1 \end{pmatrix} \begin{pmatrix} \alpha \\ \beta \\ \gamma \end{pmatrix} ⎩⎪⎪⎨⎪⎪⎧xPyp1=αx1+βx2+γx3=αy1+βy2+γy3=α+β+γ⟺⎝⎛xPyP1⎠⎞=⎝⎛x1y11x2y21x3y31⎠⎞⎝⎛αβγ⎠⎞
根据 Cramer 法则,
α=S△PBCS△ABC,β=S△PCAS△ABC,γ=S△PABS△ABC\alpha = \frac{S_{\triangle PBC}}{S_{\triangle ABC}},\quad \beta = \frac{S_{\triangle PCA}}{S_{\triangle ABC}},\quad \gamma = \frac{S_{\triangle PAB}}{S_{\triangle ABC}} α=S△ABCS△PBC,β=S△ABCS△PCA,γ=S△ABCS△PAB
这里的面积指的是三角形的有向面积,正负与三个点的位置关系有关.
所以,(S△PBC:S△PCA:S△PAB)(S_{\triangle PBC}:S_{\triangle PCA}:S_{\triangle PAB})(S△PBC:S△PCA:S△PAB) 就是点 PPP 相对于 △ABC\triangle ABC△ABC 的重心坐标,这对应的就是 “奔驰定理” 中的三个系数.
实际上,根据 “奔驰定理”,
S△PBC⋅(OA→−OP→)+S△PCA⋅(OB→−OP→)+S△PAB⋅(OC→−OP→)=0S_{\triangle PBC} \cdot \left(\overrightarrow{OA} - \overrightarrow{OP}\right) + S_{\triangle PCA} \cdot \left(\overrightarrow{OB} - \overrightarrow{OP}\right) + S_{\triangle PAB} \cdot \left(\overrightarrow{OC} - \overrightarrow{OP}\right) = \mathbf{0} S△PBC⋅(OA−OP)+S△PCA⋅(OB−OP)+S△PAB⋅(OC−OP)=0
(S△PBC+S△PCA+S△PAB)⋅OP→=S△PBC⋅OA→+S△PCA⋅OB→+S△PAB⋅OC→\left(S_{\triangle PBC} + S_{\triangle PCA} + S_{\triangle PAB}\right) \cdot \overrightarrow{OP} = S_{\triangle PBC} \cdot \overrightarrow{OA} + S_{\triangle PCA} \cdot \overrightarrow{OB} + S_{\triangle PAB} \cdot \overrightarrow{OC} (S△PBC+S△PCA+S△PAB)⋅OP=S△PBC⋅OA+S△PCA⋅OB+S△PAB⋅OC
也可以直接得到,当点 PPP 在 △ABC\triangle ABC△ABC 内部的时候,它相对于 △ABC\triangle ABC△ABC 的重心坐标为 (S△PBC:S△PCA:S△PAB)(S_{\triangle PBC}:S_{\triangle PCA}:S_{\triangle PAB})(S△PBC:S△PCA:S△PAB).
由于三角形的重心坐标和面积有关系,因此也被称为面积坐标.
2.4. 重心坐标名称的来源
考虑平面内三个质点 AAA、BBB、CCC,它们的质量分别为 m1m_1m1、m2m_2m2、m3m_3m3,则该质心系的质心相对于 △ABC\triangle ABC△ABC 的重心坐标恰好为 (m1,m2,m3)(m_1,m_2,m_3)(m1,m2,m3).
3. 三角形各中心的重心坐标
下表列出了几个常见的三角形中心的重心坐标.
sin2A:sin2B:sin2C\sin 2A:\sin2B:\sin 2Csin2A:sin2B:sin2C
(1−cosBcosC):(1−cosCcosA):(1−cosAcosB)(1-\cos B\cos C):(1-\cos C\cos A):(1-\cos A\cos B)(1−cosBcosC):(1−cosCcosA):(1−cosAcosB) 垂心 (a2+b2−c2)(a2−b2+c2):(−a2+b2+c2)(a2+b2−c2):(a2−b2+c2)(−a2+b2+c2)(a^{2}+b^{2}-c^{2})(a^{2}-b^{2}+c^{2}):(-a^{2}+b^{2}+c^{2})(a^{2}+b^{2}-c^{2}):(a^{2}-b^{2}+c^{2})(-a^{2}+b^{2}+c^{2})(a2+b2−c2)(a2−b2+c2):(−a2+b2+c2)(a2+b2−c2):(a2−b2+c2)(−a2+b2+c2)
tanA:tanB:tanC\tan A:\tan B:\tan CtanA:tanB:tanC
acosBcosC:bcosCcosA:ccosAcosBa\cos B\cos C:b\cos C\cos A:c\cos A\cos BacosBcosC:bcosCcosA:ccosAcosB 旁心 −a:b:ca:−b:ca:b:−c-a:b:c\quad \quad a:-b:c\quad \quad a:b:-c−a:b:ca:−b:ca:b:−c
其它特殊点的重心坐标,可以查看 ETC,里面每个点下面列出的 Barycentrics 就是该点的重心坐标.
4. 重心坐标的一般定义
事实上,重心坐标的定义可以推广到 nnn 维向量空间,甚至是仿射空间.
考虑 nnn 维仿射空间 A\mathbf AA 中的仿射无关的 n+1n+1n+1 个点 A0,A1,⋯,AnA_0,A_1,\cdots,A_nA0,A1,⋯,An,即 A0,A1,⋯,AnA_0,A_1,\cdots,A_nA0,A1,⋯,An 是一个 nnn 维单形的顶点,则对于任意一点 P∈AP \in \mathbf AP∈A,存在不全为零的实数 λ0,λ1,⋯,λn\lambda_0,\lambda_1,\cdots,\lambda_nλ0,λ1,⋯,λn,使得
(λ0+λ1+⋯+λn)OP→=λ0OA1→+λ1OA2→+⋯+λnOAn→(\lambda_0+\lambda_1+\cdots+\lambda_n)\overrightarrow{OP} = \lambda_0\overrightarrow{OA_1}+\lambda_1\overrightarrow{OA_2}+\cdots+\lambda_n\overrightarrow{OA_n} (λ0+λ1+⋯+λn)OP=λ0OA1+λ1OA2+⋯+λnOAn
对于任意一点 OOO 成立,则称 (λ0:λ1:⋯:λn)(\lambda_0:\lambda_1:\cdots:\lambda_n)(λ0:λ1:⋯:λn) 为点 PPP 相对于 A0,A1,⋯,AnA_0,A_1,\cdots,A_nA0,A1,⋯,An 的重心坐标.
重心坐标是一种齐次坐标,在仿射变换下保持不变.
(λ0:λ1:⋯:λn)(\lambda_0:\lambda_1:\cdots:\lambda_n)(λ0:λ1:⋯:λn) 和 (μ0:μ1:⋯:μn)(\mu_0:\mu_1:\cdots:\mu_n)(μ0:μ1:⋯:μn) 都是点 PPP 相对于 A0,A1,⋯,AnA_0,A_1,\cdots,A_nA0,A1,⋯,An 的重心坐标的充要条件是,存在非零常数 kkk,使得对于任意的 iii,有 λi=kμi\lambda_i = k\mu_iλi=kμi.
类似的,也可以对其进行正规化,取 ∑i=0nλi=1\displaystyle\sum_{i=0}^n \lambda_i=1i=0∑nλi=1 即可.
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK