

技术分享 | 李群与轨迹规划
source link: https://zhuanlan.zhihu.com/p/110006284
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

技术分享 | 李群与轨迹规划
机器人学是一门很有趣的科学,因为它研究和控制的是实际物理世界中的对象,我们必须要遵照物理世界的一些规则来设计机器人的控制策略,才可能尽可能实现想要的控制效果。
前面,我们介绍过李群理论在视觉伺服与处理动力学约束上的应用。这次,我们来介绍一下李群理论在轨迹规划方面的应用。
视频放前面:
轨迹规划可以分为路径插补和时间计算两部分。
假设,我们通过人工示教的形式,得到了机器人要运行经过的几个路径点。但,由于受到物理世界的限制,我们无法让机器人在这几个路径点之间瞬移。我们必须要找到一条连续的路径,连接这些路径点。这个过程就是路径插补,通过路径规划,我们可以得到一条几何路径 ,
是
范围内的标量。
有了几何路径后,我们就可以以不同的速度沿着这条路径上运动,我们可以得到一个速度率 ,其中
是时间。这个过程就是时间计算,通过时间计算,我们就得到了一条连续、带时间戳的轨迹
。
上面简单介绍了一下轨迹规划的定义。具体的其他更详细介绍,推荐一本教材:
Biagiotti, Luigi, Melchiorri, Claudio. Trajectory Planning for Automatic Machines and Robots [J]. 10.1007/978-3-540-85629-0.
这里,我想讨论的是,路径插补对时间计算的影响。
我们知道,速度是一个矢量,受物理世界影响,速度的大小与方向都不可以发生突变(惯性)。
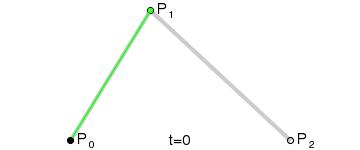
如果,我们采用最简单的线性插值连接每个路径点。那么,如上图所示,在过渡点处的速度方向必然会发生突变。在实际物理世界中,要么最终的轨迹偏离上述路径,要么机器人的 B 点处的速度降为 0。从而影响控制的精度与速度。
当然,见多识广的读者们肯定会想到说,机器人学的教材中介绍过,可以在 B 点处用圆弧或者多项式曲线进行过渡,从而让路径的切向不会发生突变。
于是,问题来了。姿态怎么过渡?或者说,姿态空间的圆弧或者多项式曲线是怎么定义的?(这其实是 RVBUST INC. 之前的一道面试题)
有人可能会说,四元数有一个 slerp 插值,可以做姿态空间的插补。是真的吗?
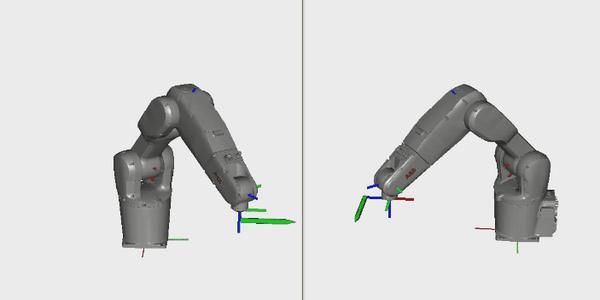
例如上图所示,一个刚体要在三个姿态之间插补出一条连续路径(位置相同)。Slerp 插值就是计算出两个姿态间的旋转轴,然后绕着旋转轴旋转。上面的例子用 Slerp 插值的效果如下:
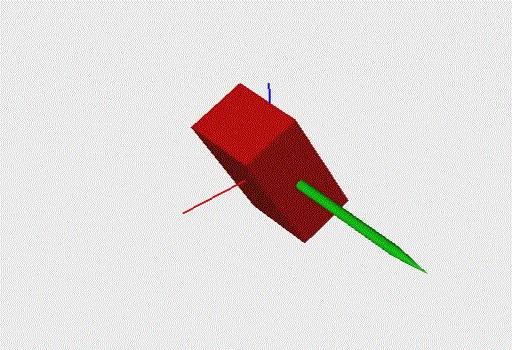
Slerp 插值结果,图中绿色箭头是角速度方向
Slerp 插值实际上就是姿态空间的直线插值。所以,在中间过渡点处,角速度的方向会发现突变。
为了解决姿态插值问题,学术界(包括近两年 IROS 和 ICRA 等顶会)不断有关于高阶连续姿态插值的成果发布。在这里,我们不妨用李群表示论来看待这个问题:
对于线性空间(笛卡尔位置,关节空间等),我们可以很容易定义出两个状态 和
之间的直线插值:
对于姿态空间,两个状态 和
,我们利用李群定义群内的运算:
- 加法:
- 逆运算:
于是可以推导出群空间的“减法”运算:
Logm 是矩阵的对数运算,具体可以参考一些介绍李群李代数基本运算的书,这里不赘述。
我们可以发现姿态空间的 Slerp 插值(直线插值)也可以表示成与线性空间类似的结构:
有了上面的知识,我们再来看轨迹插补。对于线性空间,我们可以利用多项式进行插补。而 Bezier 曲线就是一种构造多项式曲线的方式:
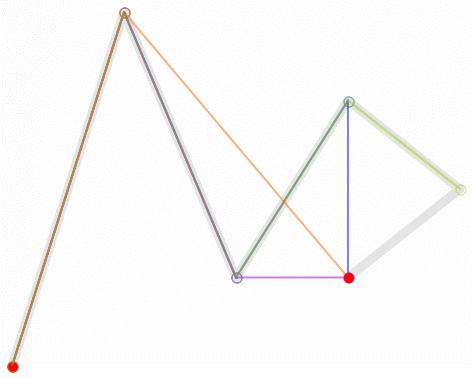
从上面两个动图(出自 Wikipedia),我们可以发现,n 阶的 Bezier 曲线就是通过 n 个线性插值构造出来的。
我们有了任意李群空间的线性插值定义,就可以很自然地推导出任意李群空间的 Bezier 曲线定义 (多项式)。
于是,我们就可以得到 Bezier 过渡的姿态插值:
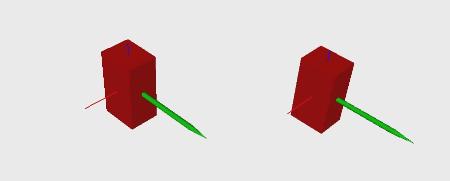
如上动图所示,利用李群空间表示法获得的 Bezier 过渡,可以保证姿态轨迹的切向不会发生突变。
前面,我们在做机器人高速动态搬运的时候,其实也需要保证整个 SE(3) 空间的轨迹插补连续性,也是用到了这些技术。

点击链接,来如本与我们一起玩。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK